

(6 plus 1)-dimension force feedback sensing device
A transfer wheel and elbow technology, which is applied to manipulators, joints, program-controlled manipulators, etc., can solve the problems of limited force feedback output capability, small force feedback dimension, and high price, and achieve large feedback force, compact structure, and manufacturing low cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
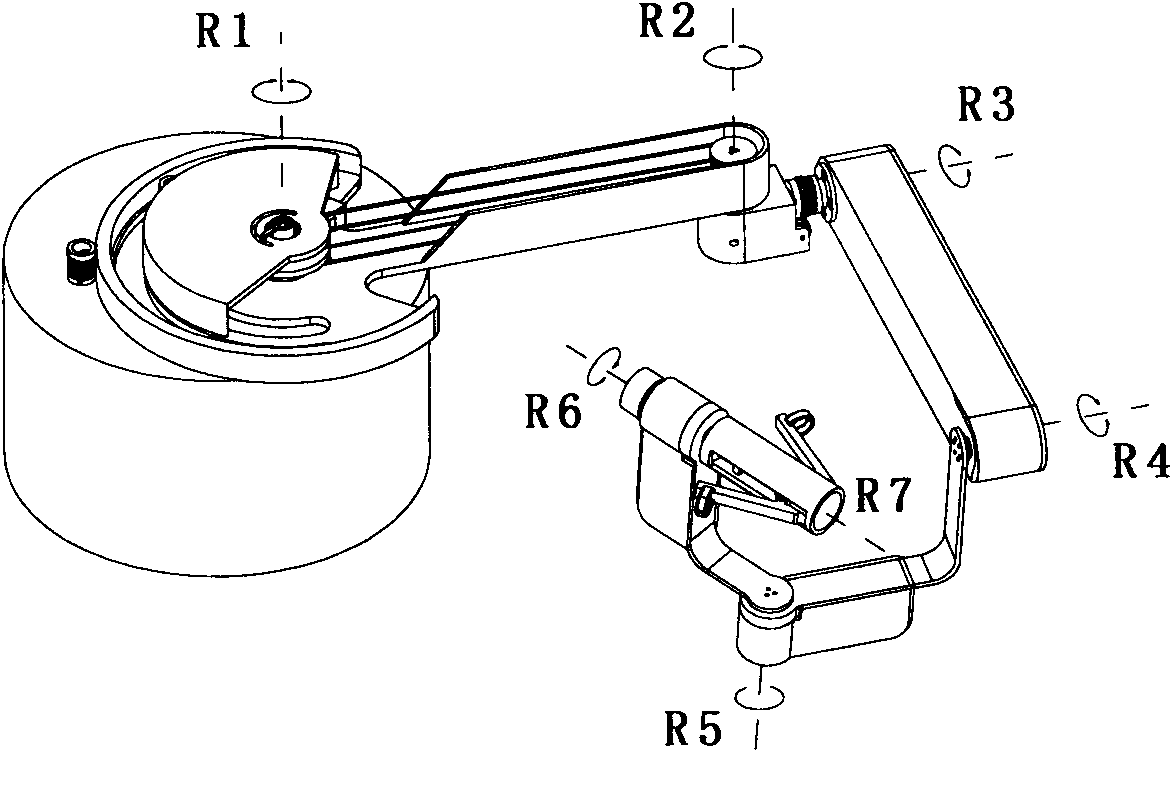
[0019] figure 1 Shown is a schematic diagram of the overall structure of the present invention. The illustrated R1, R2, R3, R4, R5, R6 and R7 describe the 6+1 joints of the present invention, wherein R1, R2 and R3 can determine the space of the tactile device Position, R4, R5, R6 constitute the wrist structure where the three axes meet, and R7 is the opening and closing joint. The relevant joints will be introduced in detail later.
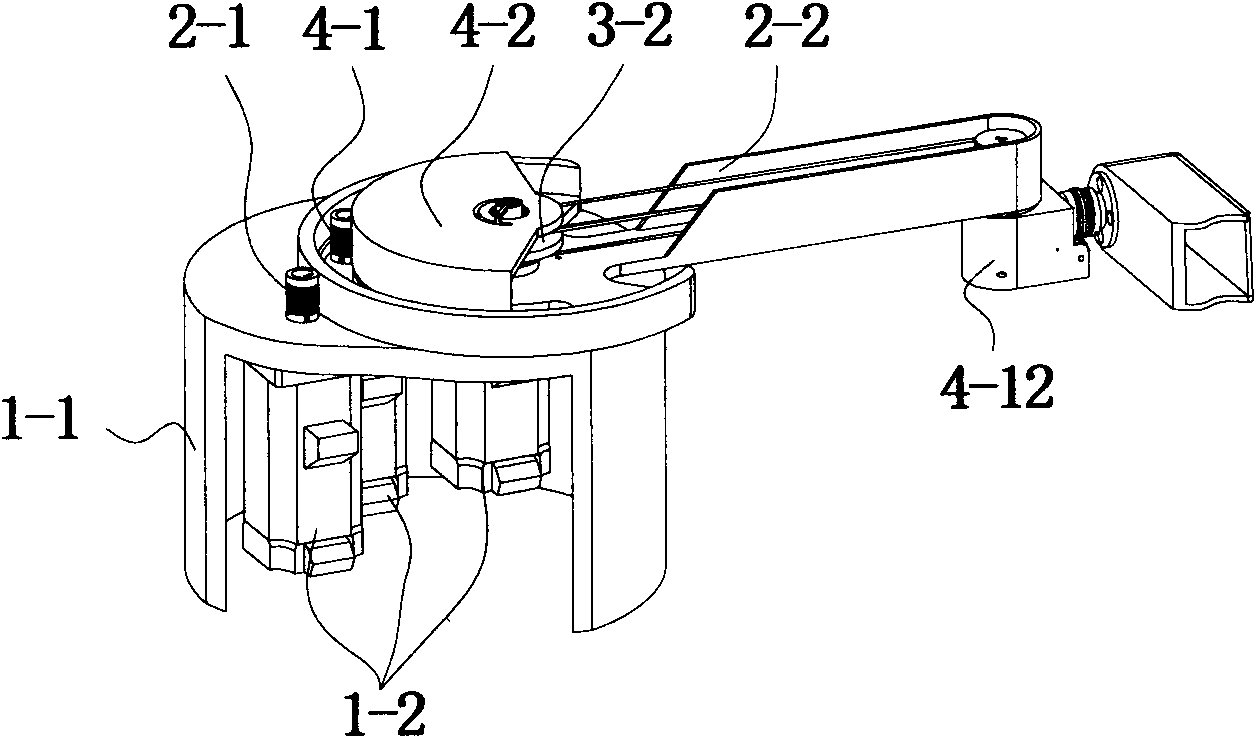
[0020] The base mechanism 1-1 is a box for supporting the whole touch device, such as figure 2 As shown, the controller of the tactile device and the motor 1-2, motor 1-3, and motor 1-4 of the rod part are arranged inside, and the three motors are arranged asymmetrically. The motor 1-2, the motor 1-3, and the motor 1-4 are respectively fixed on the base mechanism 1-1 by screws. The base mechanism 1-1 is conne...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More