

Method for measuring three-dimensional contact force of tail end of mechanical hand of teleoperation robot
A technology of a teleoperated robot and a measurement method, which is applied in the field of force parameter determination of a teleoperated robot manipulator, can solve the problems of difficult assembly, high power consumption, low sensitivity and the like
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
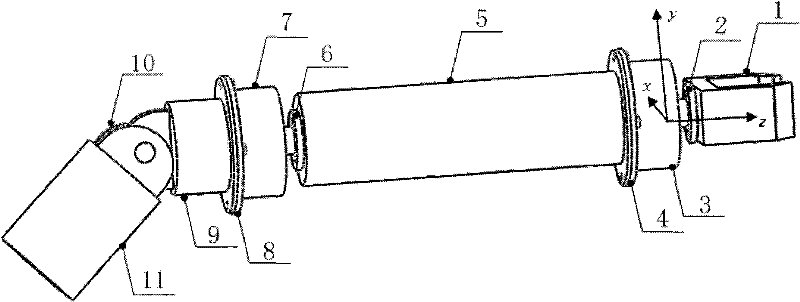
[0026] refer to figure 2 , is a telepresence remote operation robot manipulator device, and its main task is to carry out operations such as object grasping in extreme environments such as high temperature, high pressure, strong radiation, and suffocation that are difficult for people to approach. It includes a teleoperation manipulator gripper 1, a first three-dimensional force sensor 3, a teleoperation manipulator forearm 5, a second three-dimensional force sensor 7, a teleoperation robot elbow joint 10 composed of a hinge, and the second three-dimensional force sensor is fixed between the hinge and the forearm. The base 9 of the force sensor and the rear arm 11 of the teleoperated mechanical arm. The first three-dimensional force sensor 3 is fixed to the front end of the forearm 5 of the teleoperated manipulator through the flange plate 4 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More