

Method for performing space registration on radar and infrared sensor configured on identical platform
An infrared sensor and spatial registration technology, applied in the field of data fusion, can solve the problems of limited initial value of prediction covariance matrix, sensitive initial value of system state, and low registration accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
[0051] figure 1 It shows the implementation flow of the method for spatial registration of the radar and the infrared sensor configured on the same platform provided by the embodiment of the present invention, and the specific steps are as follows:
[0052] In step S101, according to the state vector of the system, the state equation of the system is established, namely:
[0053] X(t k+1 )=[h 1 (t k ), h 2 (t k ), h 3 (t k ), h 4 (t k ), h 5 (t k ), h 6 (t k ), h 7 (t k ), h 8 (t k )] T +W(t k ),in:
[0054] h 1 ( t k ) = sqrt ( ( ξ x ( t k ) + x · ...
Embodiment 2
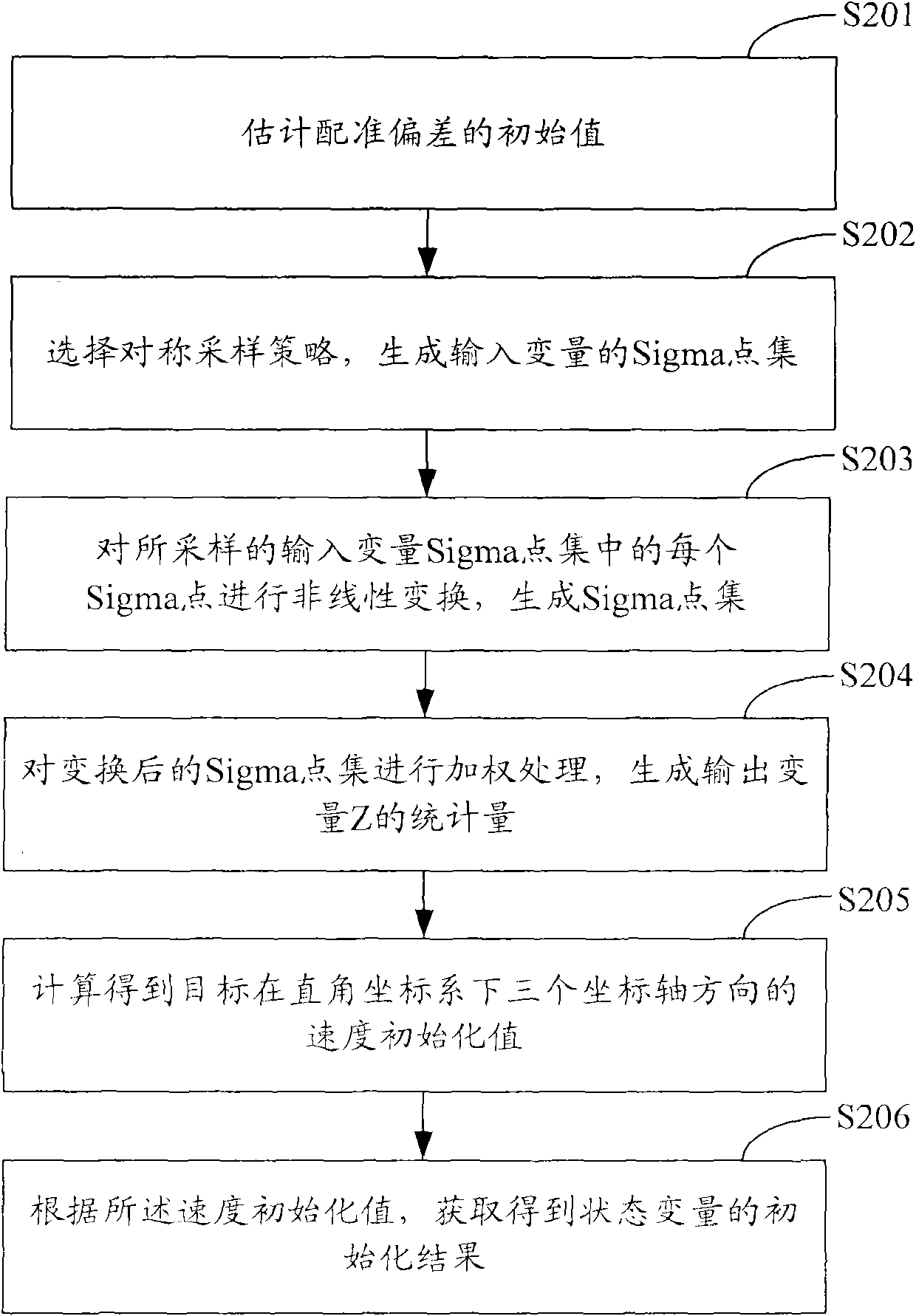
[0080] figure 2 It shows the implementation process of obtaining the initialization value of the system state vector through the UT transformation of the measurement of the radar and the infrared sensor at the first two moments provided by the embodiment of the present invention, and the specific steps are as follows:
[0081] In step S201, an initial value of registration deviation is estimated.
[0082] In the embodiment of the present invention, assume that the first two measurement data of the radar are respectively: (ρ r (t 0 ), θ r (t 0 ), η r (t 0 )), (ρ r (t 1 ), θ r (t 1 ), η r (t 1 )), the first two data of the infrared sensor are: (θ i (t 0 ), η i (t 0 )), (θ i (t 1 ), η i (t 1 )), so that the azimuth angle deviation and the elevation angle deviation of the infrared sensor are (Δθ i (t k ), Δη i (t k )), is the state vector of the system.
[0083] The azimuth angle deviation and pitch angle initialization deviation of the infrared sensor c...
Embodiment 3
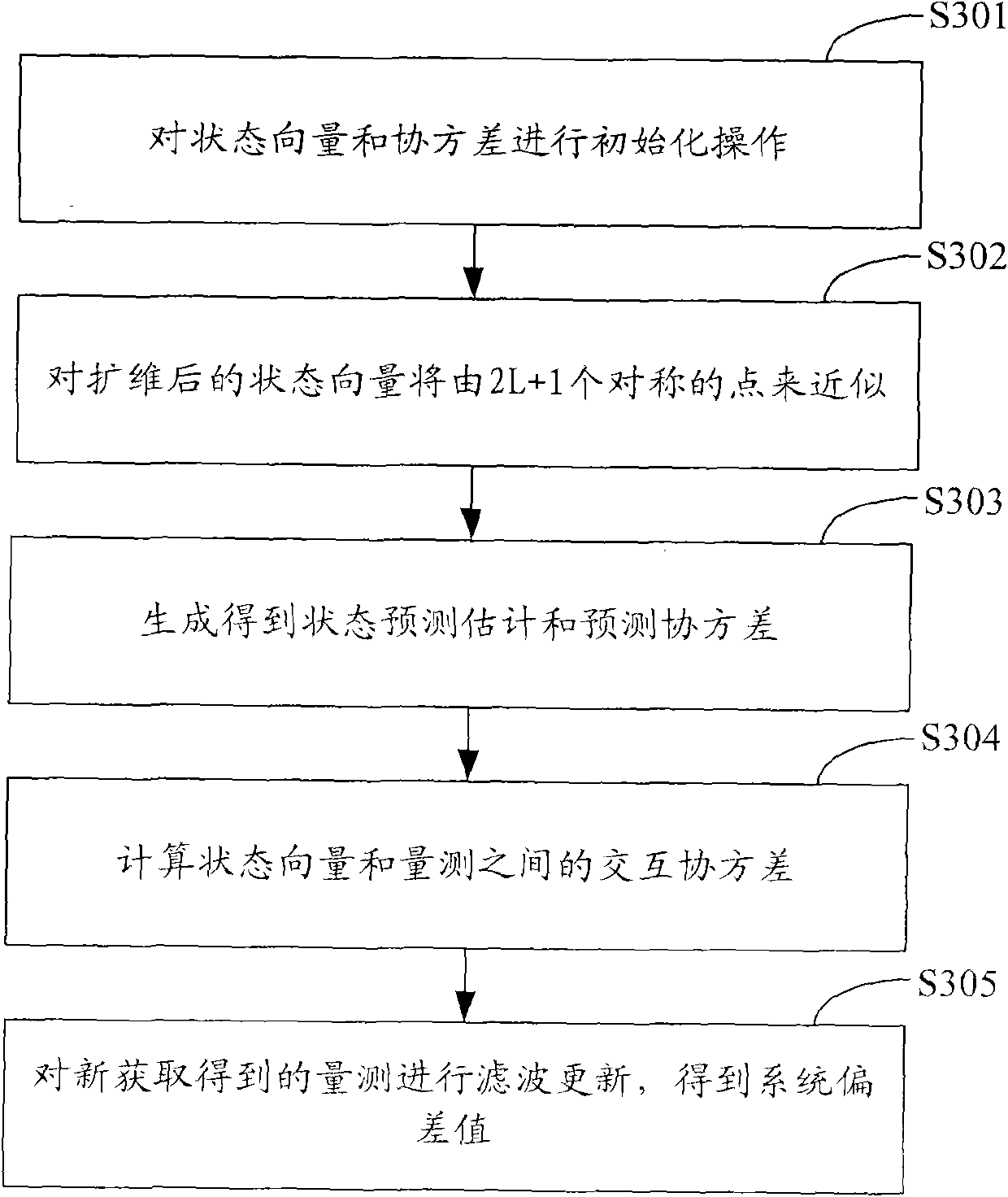
[0113] image 3 It shows the implementation process of performing UKF filter registration on the measurement data according to the initialization value of the system state equation, measurement equation and state vector provided by the embodiment of the present invention, and obtaining the spatial registration deviation of the infrared sensor relative to the radar, The specific steps are as follows:
[0114] In step S301, the state vector and covariance are initialized, namely:
[0115] x ^ 1 ( 0 ) = X ( t 0 ) = [ ρ r ( t 0 ) , θ r ( ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More