

Method for barrier perception based on airborne binocular vision
A binocular vision and obstacle technology, applied in the field of aircraft navigation and computer vision, can solve the problems of inability to apply the aircraft task execution stage, unable to meet the needs of navigation applications, unable to meet real-time navigation, etc. The effect of good real-time performance and simple generation method
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Embodiments of the present invention are described in detail below, examples of which are shown in the drawings, wherein the same or similar reference numerals designate the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
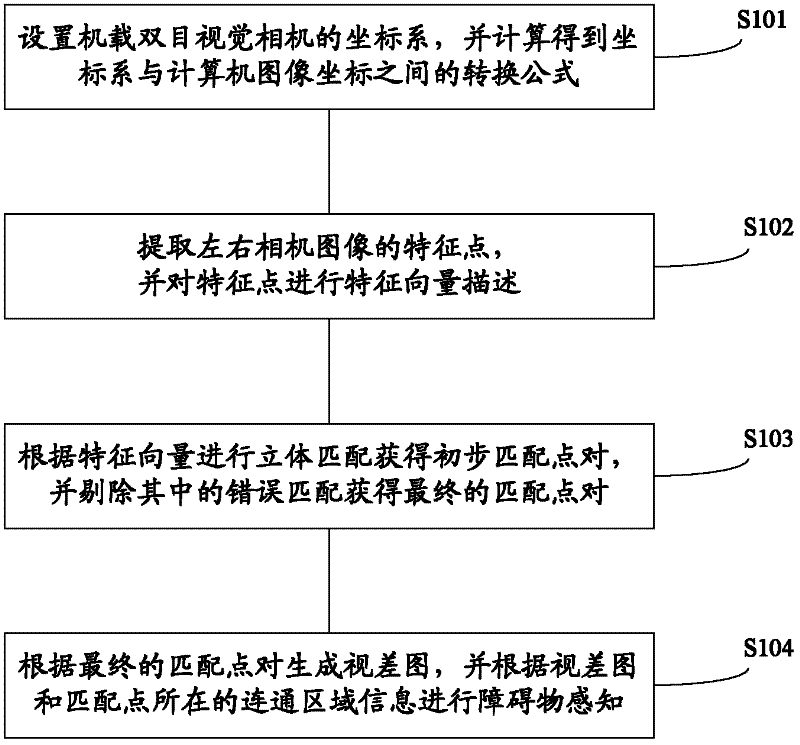
[0016] Such as figure 1 As shown, the obstacle perception method based on airborne binocular vision according to an embodiment of the present invention includes the following steps:
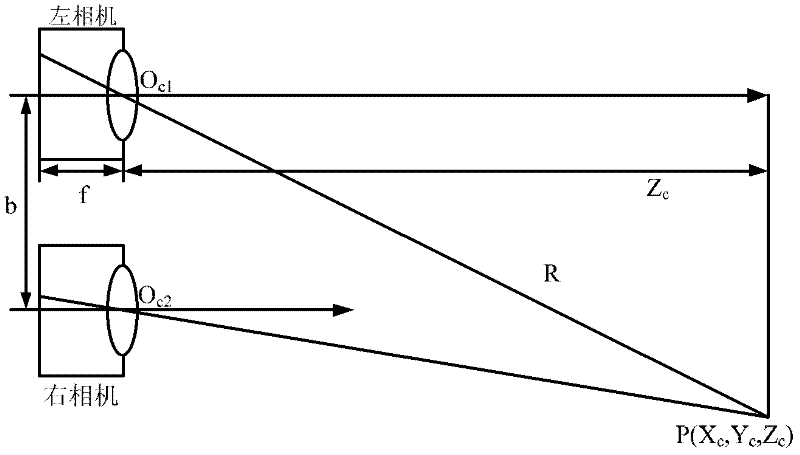
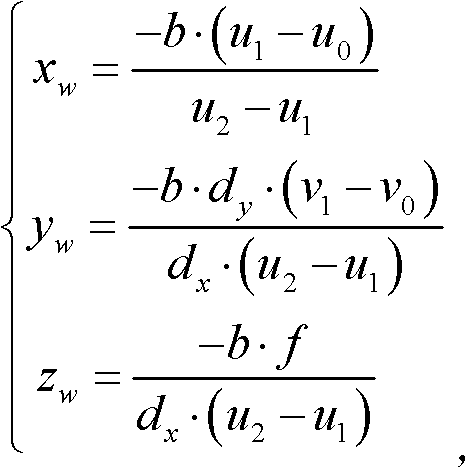
[0017] Step S101, setting the coordinate system of the onboard binocular vision camera, and calculating a conversion formula between the computer image coordinates of the image formed by the onboard binocular vision camera and the coordinate system according to the coordinate system.
[0018] The establishment of the image coordinate system and the measure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More