

Robot traveling device with liftable frame
A walking device and robot technology, applied in the field of robots, can solve problems such as safety accidents, damage, and loss of control of robot walking, and achieve the effect of stable walking and strong obstacle-surmounting ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
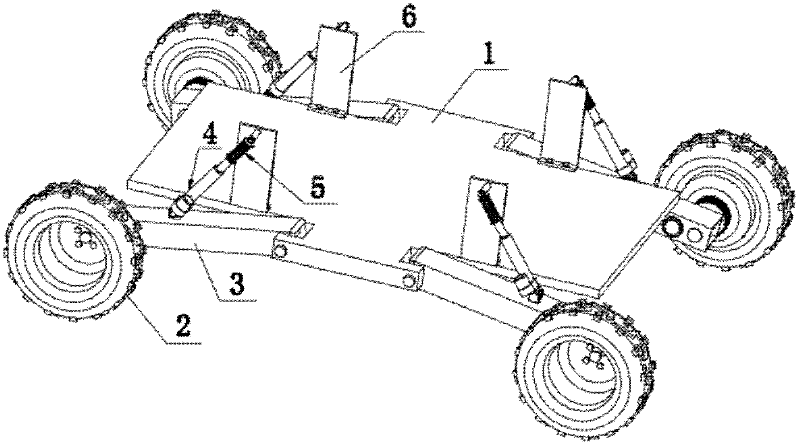
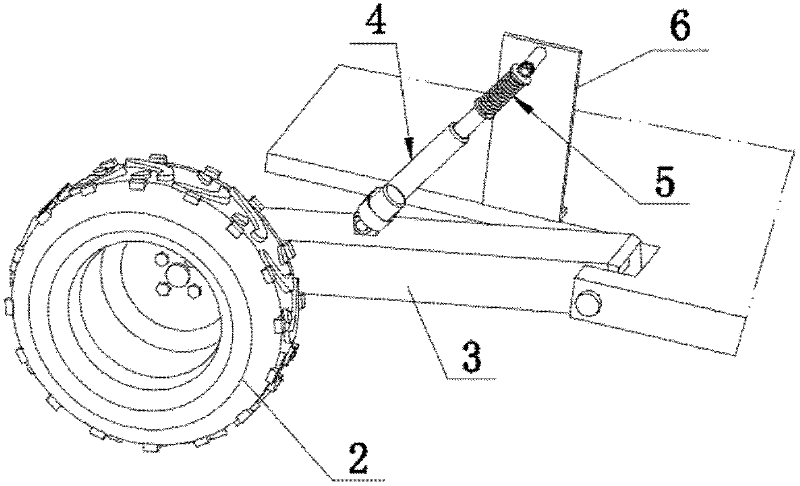
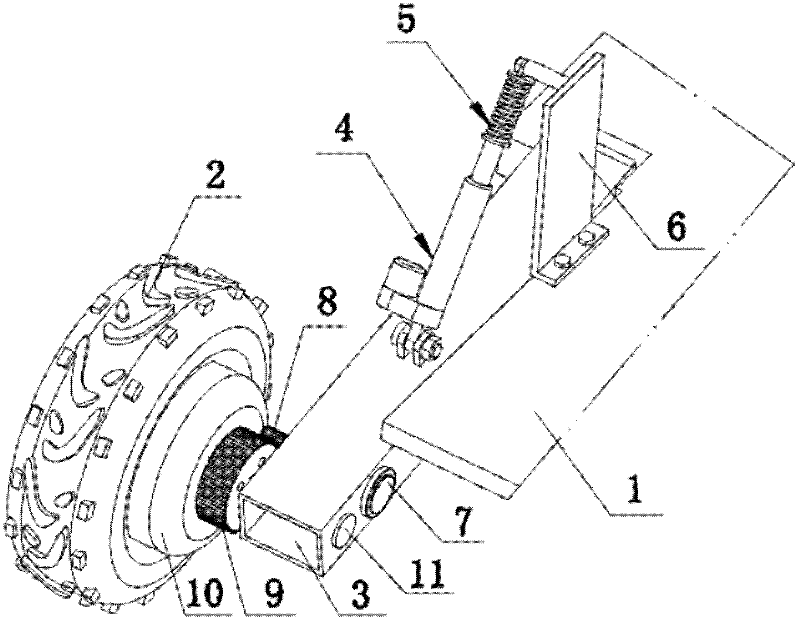
[0021] see Figure 1 ~ Figure 3 , in this example, the described vehicle frame 1 is a rectangular board, all has a rectangular cut-out part along the longitudinal direction at the four corners of this rectangular board, the end of each rectangular cut-out part is respectively connected with one of the independent suspension One end of the cantilever 3 is hinged, and the axis of the cantilever 3 is located in the vertical plane of the vehicle frame 1 ; the other end of each cantilever 3 is hinged to the axle 11 of a wheel 2 . The upper head of the shock absorber in the independent suspension is hinged on the support plate 6 fixed on the vehicle frame 1, and the lower head is hinged on the middle part of the cantilever 3. see Figure 4 ~ Figure 6 , the shock absorber is composed of an electric push rod 4 and a double-acting cylindrical shock absorber 5 coaxially arranged in series at the end of the push rod 4-2 of the electric push rod 4, wherein the two-way acting The cylindr...
Embodiment 2
[0023] This embodiment is improved on the basis of Embodiment 1, and the improvement is that the coil spring 5-3 of the coil spring damper is arranged in the cylinder 5-4. see Figure 7 , the piston 5-2 at one end of the piston rod 5-1 stretches into and fits in the cylinder 5-4, one end of the piston 5-2 is against the end cover 12, and the other end is provided with a coil spring 5-3, The other end of the helical spring 5-3 is against the bottom of the cylinder 5-4.
Embodiment 3
[0025] The difference between this embodiment and Embodiment 1 is that the double-acting cylindrical shock absorber 5 in this example is a hydraulic damping type shock absorber. see Figure 8 and Figure 9, the cylinder 5-4 is coaxially provided with an inner cylinder 14, the annular space between the inner cylinder 14 and the cylinder 5-4 is an oil storage area 16, and the bottom of the inner cylinder 14 communicates with the oil storage area 16 . The piston 5-2 at one end of the piston rod 5-1 stretches into and movably fits into the inner cylinder 14, and the piston 5-2 is provided with two flow valves 17, which are one-way flow valves with two opposite directions. Valve: the bottom of the inner cylinder 14 is provided with a partition 15 that blocks the inner cylinder 14, and the partition 15 is provided with two compensation valves 18, and these two compensation valves 18 are also two one-way valves with opposite directions. End caps 12 and oil seals are provided at th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More