

Adaptive control method for current loop of magnetic levitation system
An adaptive control and magnetic suspension technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems affecting the overall performance of the magnetic suspension system, affecting the current loop current rise time and gain, etc., to overcome the suspension system. The performance is unstable, the suspension performance is stable and reliable, and the effect of ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
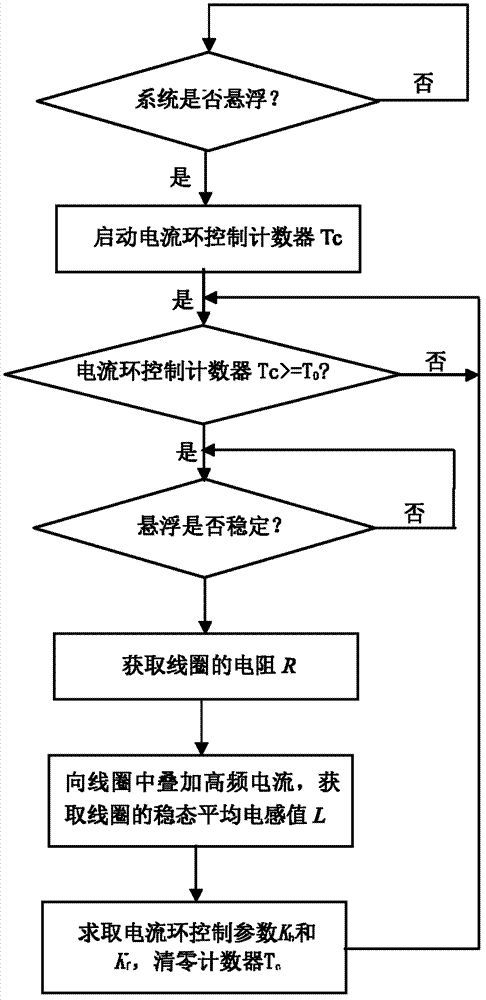
[0030] like image 3 As shown, the implementation steps of the current loop adaptive control method of the magnetic levitation system in the embodiment of the present invention are as follows:
[0031] 1) After the maglev system is levitated, judge whether the maglev system is stable or not;
[0032] 2) If the suspension is stable, then collect the suspension stabilization current I and the suspension stabilization voltage U of the magnetic levitation system coil, and obtain the suspension stabilization resistance R of the coil according to the suspension stabilization current I and the suspension stabilization voltage U in combination with R=U / I;
[0033] 3) Superimpose the high-frequency current that does not change the levitation gap of the magnetic levitation system to the coil, and collect the current I of the coil multiple times during the coil current change process i (i=1, 2, 3...) and voltage U i (i=1, 2, 3...), according to the current I collected by the coil durin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More