

Autonomous non-overshoot state switching method of ship inertial navigation system
An inertial navigation system and state switching technology, applied in the field of inertial navigation, can solve problems such as the impact of inertial navigation system accuracy on ship navigation safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0071] Below in conjunction with accompanying drawing and specific embodiment the present invention will be described in further detail:
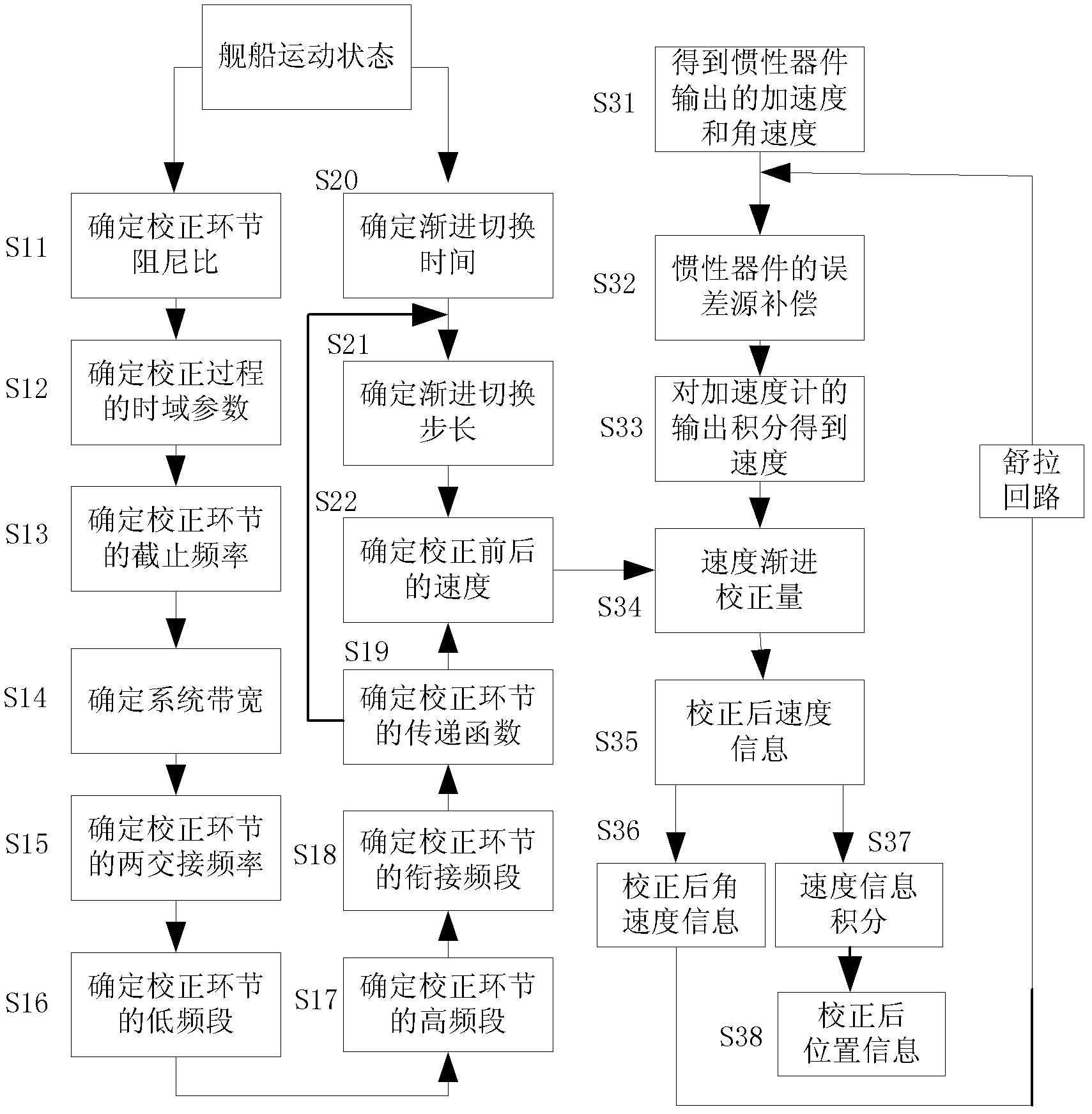
[0072] Such as figure 1 The autonomous non-overshoot state switching method of a kind of ship inertial navigation system is characterized in that it comprises the following steps:
[0073] Step S11: According to the ship's motion state (speed, acceleration, frequency and amplitude of rocking motion), consider the two aspects of suppressing system error and reducing the influence of the correction link on the system circuit, and determine the damping ratio ζ suitable for the ship's state. The ratio ζ is 0 to 1, preferably 0.5;
[0074] Step S12: Determine the time-domain parameters of the correction link, the time-domain parameters include the resonance peak value M r and adjustment time t s ,
[0075] According to the relationship between the resonance peak of the second-order system and the damping ratio
[0076] M ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More