

Travelling mechanism of pipeline robot
A pipeline robot and walking mechanism technology, applied in the field of robots, to achieve the effect of simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] In order to have a clearer understanding of the technical features, purposes and effects of the present invention, the specific implementation manners of the present invention will now be described with reference to the accompanying drawings.
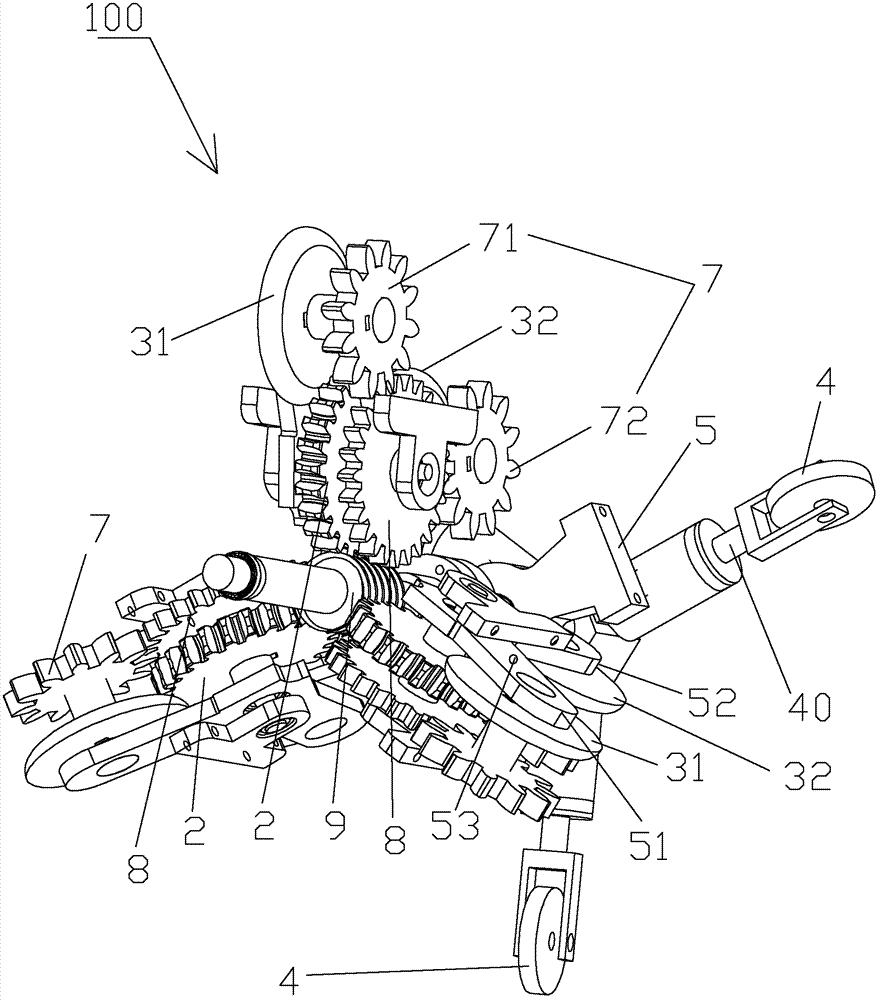
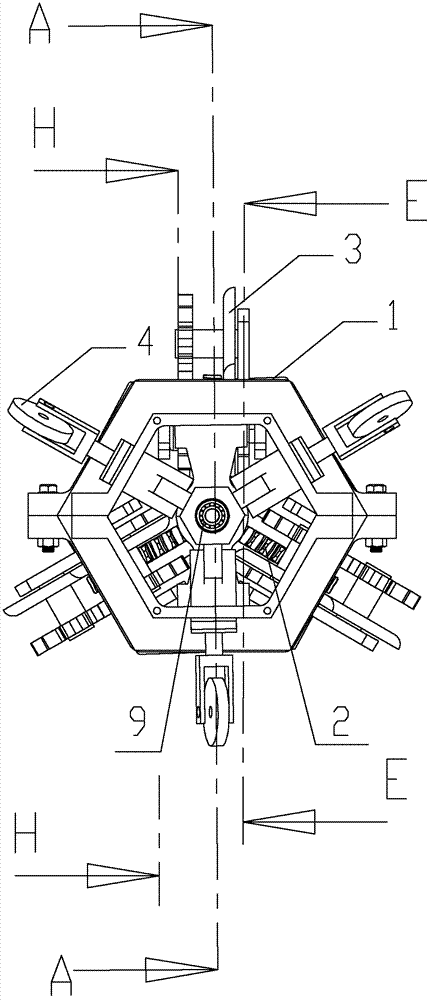
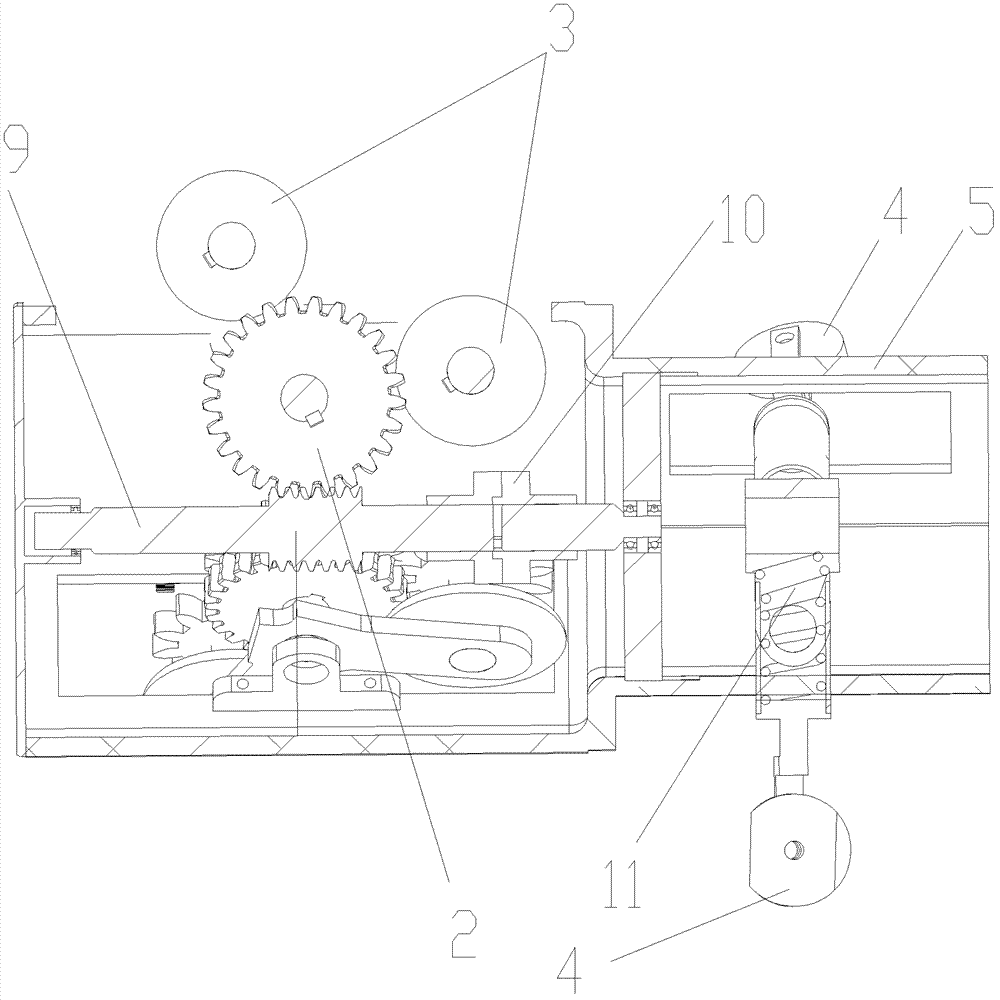
[0027] Such as figure 1 As shown, the present invention proposes a walking mechanism 100 of a pipeline robot. The walking mechanism 100 of the pipeline robot includes: a worm 9 and a motor 12 driving the worm. The axis of the worm coincides with the axis of the pipeline. The motor 12 can be selected A motor with a cable, such as a DC servo torque motor 200LYX03, in order to have a simple and compact structure, the motor 12 is sequentially connected with the worm 9 through the coupling 10 along the length direction; the three sets of planetary gear sets are respectively located in three planes, as mentioned here The three planes do not include three parallel planes. The plane where each planetary gear set is located refers to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More