

On-site measurement method applied to space curved surface machining for robot grinding system
A technology of curved surface processing and measurement methods, which is applied to metal processing equipment, parts of grinding machine tools, grinding machines, etc., can solve problems such as the vibration of robots, the flexibility of robot grinding systems, and the difficulty of further improving the accuracy of on-site measurement. , to achieve the effect of improving measurement accuracy and grinding accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
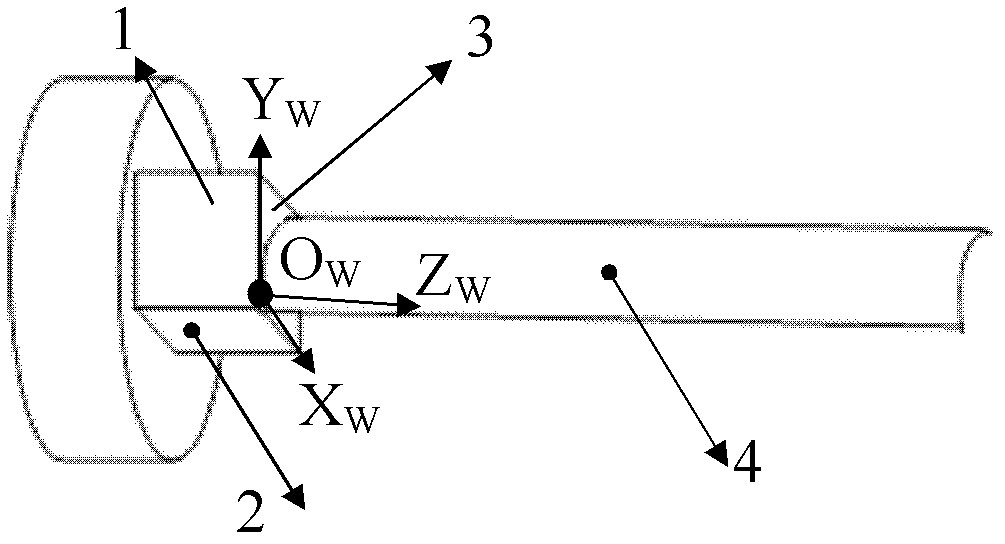
[0028] With reference to the accompanying drawings and specific embodiments, a turbine blade is taken as an example, and the method proposed by the present invention will be further described in detail through comparison with existing methods.
[0029] In the robotic abrasive belt grinding system used in the method of the present invention, a multi-degree-of-freedom coordinate measuring machine is used to replace the fixed contact or non-contact detection head. During a complete workpiece measurement, the workpiece remains stationary and passes coordinate measurement The inspection head of the machine moves to complete the measurement. The robot grinding system can be divided into three parts: 1) the abrasive belt grinding system, which is composed of the belt grinder and the controller of the abrasive belt grinder; 2) the robot system, which is generally composed of tandem industrial robots, robot controllers and The related sensors (such as force sensors, etc.) are composed; 3)...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More