

Robot claw
A technology of robots and grippers, applied in the directions of manipulators, chucks, manufacturing tools, etc., can solve the problems of overloading, detachment, and bulkiness of reclaiming materials, and achieve the effect of good use effect, light use weight and prolong life.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to describe the technical content, structural features, achieved goals and effects of the present invention in detail, the following will be described in detail in conjunction with the embodiments and accompanying drawings.
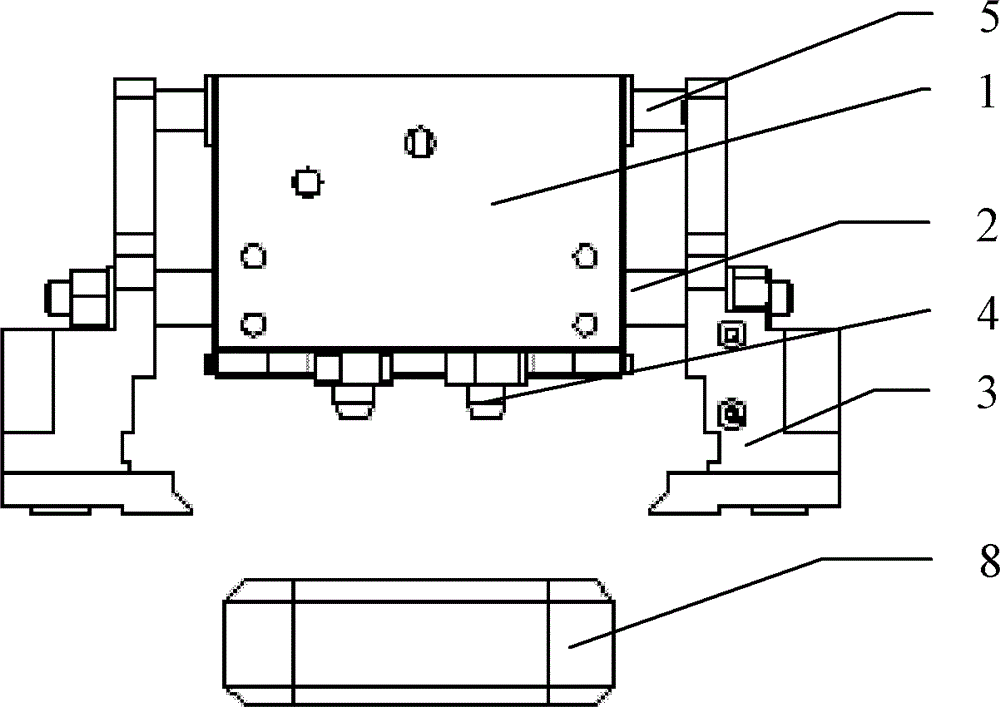
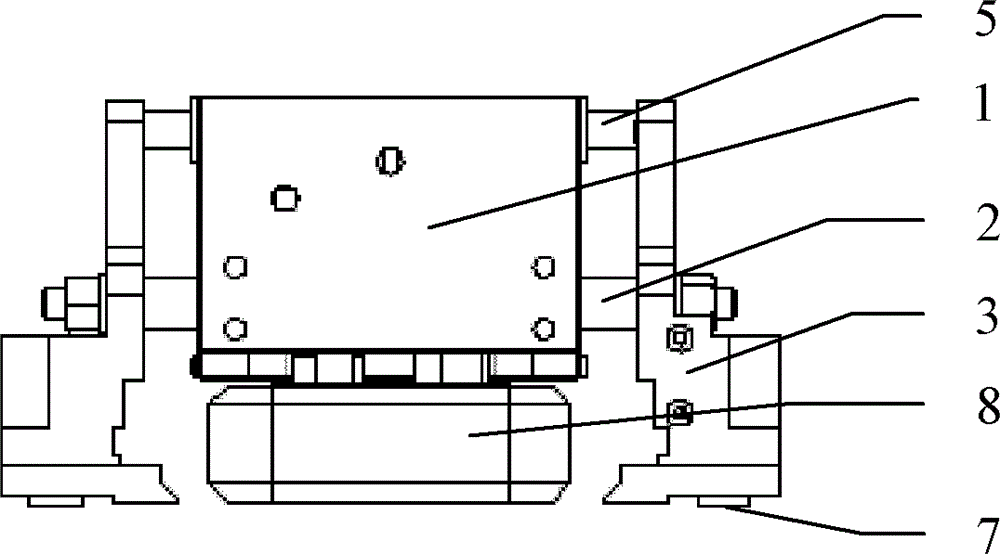
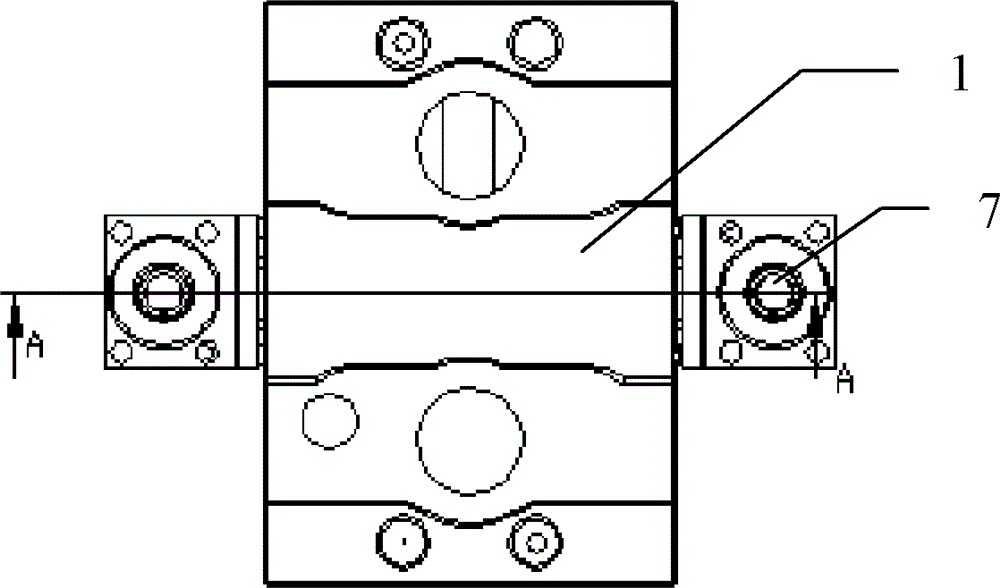
[0019] As an embodiment of the robotic gripper of the present invention, see Figure 1 to Figure 5 , comprising a cylinder block 1, a two-way cylinder, positioning pins 4 and grabbing nippers 3, the two-way cylinder is arranged on the cylinder block 1, a main shaft piston 2 is respectively provided at both ends of the two-way cylinder, and the grabbing nippers 3 Set on the main shaft piston 2, the positioning pin 4 is set on the lower surface of the cylinder block 1, the grasping nipper 3 is provided with a propping mechanism 7, and the propping mechanism 7 includes a propping cylinder 71 and a propping Raise the rod 72, and the described prop up rod 72 is arranged on the prop up cylinder 71.
[0020] The specific operation process of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More