

Differential motion driving magnetic adsorption type multifunctional wall climbing robot with small-folding-size mechanical arms
A technology of wall-climbing robots and robotic arms, which is applied in the direction of manipulators, motor vehicles, claw arms, etc., can solve the problems of insufficient flexibility of small folding size robotic arms, adsorption of wall-climbing robots, etc., achieve strong load capacity, reliable adsorption, and improve Effect of Steering Accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
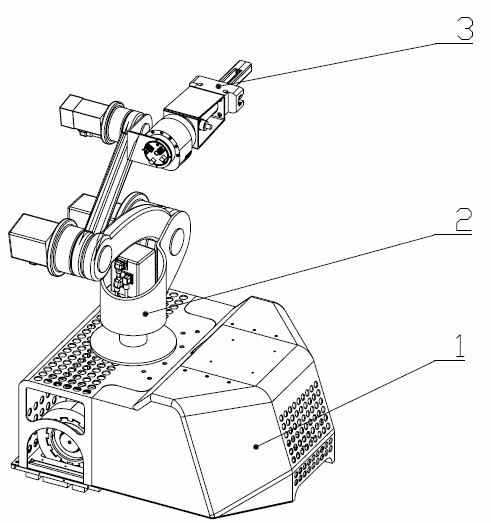
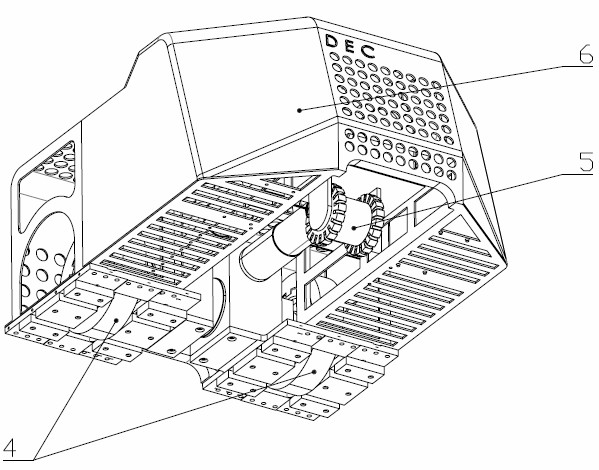
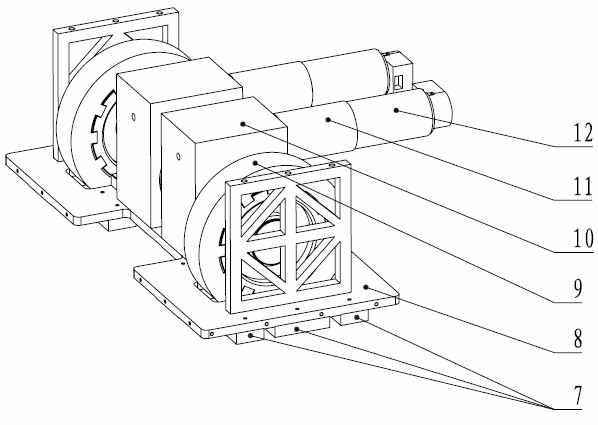
[0048] The differential drive magnetic adsorption multifunctional wall-climbing robot with a small folding size mechanical arm includes a crawling mechanism and an operating mechanism. The operating mechanism includes a multifunctional mechanical arm and an end working module. In terms of mechanism, the end working module is fixed at the end of the multifunctional robotic arm; the multifunctional robotic arm includes a base, a turntable, a large arm, a forearm, a camera and a slewing mechanism; between the big arm and the small arm, between the small arm and the rotary module, and the rotary mechanism of the rotary module itself; the multifunctional mechanical arm includes a base, a turntable, a large arm, a small arm, a rotary module, a camera, Connect the flange and the drive module, the base is fixed on the frame of the adsorption crawling mechanism, the turntable is installed on the base, the motor and the reducer drive the turntable to rotate horizontally relative to the b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More