A rope-driven mechanical arm for assisting the disabled/elderly
A rope-driven, robotic arm technology is applied in the structural field of rope-driven robotic arms for the disabled and the elderly, which can solve the problem of small joint motion coupling and driving range, unable to meet the requirements of large working space, increased energy consumption and complex structure degree and other problems, so as to improve the load-to-weight ratio and dynamic performance, avoid joint motion coupling, and solve the effect of small joint motion range.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The specific implementation of the present invention will be further described below in conjunction with the accompanying drawings, but the implementation and protection scope of the present invention are not limited thereto.
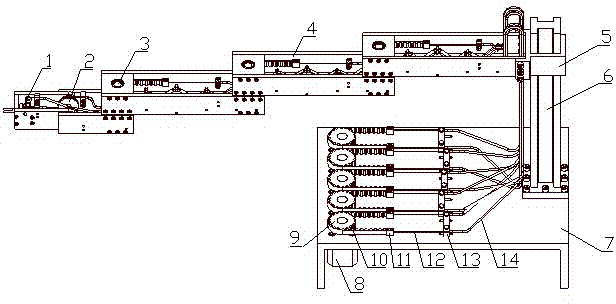
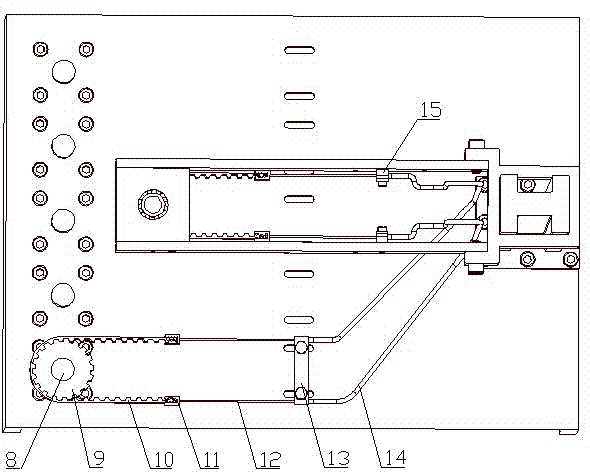
[0030] In the present embodiment, the design of the drive box: five rotating joint drive motors are fixed on the base drive box, and the motor shaft and the driving pulley are connected by flat keys. The selected length of the active timing belt is related to the driven joint. The length of the active synchronous belt driving the horizontal rotation joint shall be at least the sum of the circumference of the pitch circle of the passive pulley on the joint and the half circumference of the pitch circle of the driving pulley on the drive motor driving the joint. The distance between the base sleeve fixing device of the system and the shaft of the driving motor is at least the circumference of the pitch circle of the passive pulley on the joint, whi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More