Myoelectricity control method for remote-control robot based on touch presence feeling
A robotic muscle and tactile sensor technology, applied in manipulators, manufacturing tools, etc., can solve the problems that can only appear before or after the operation of the gripper, and cannot be obtained accurately, and achieves enhanced human-computer interaction depth and good application prospects. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The implementation of the present invention will be described in detail below in conjunction with the accompanying drawings: this implementation is carried out on the premise of the technical solution of the present invention, and detailed implementation methods and specific operation processes are provided.
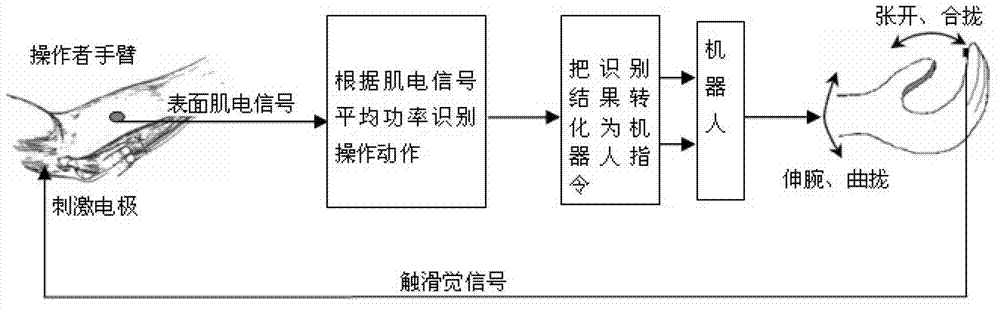
[0030] Such as figure 1 As shown, this implementation includes the following steps:
[0031] Step 1: Obtain three-channel surface electromyographic signals of the operator's arm finger extensor, extensor carpi ulnaris, and flexor carpi ulnaris. Specifically: first, the three-way surface electromyography signals of finger extensor, carpi ulnaris extensor and flexor carpi ulnaris are collected by the electromyographic signal acquisition instrument, and then the spatial correlation filtering method is used to denoise the electromyographic signals containing interference noise .
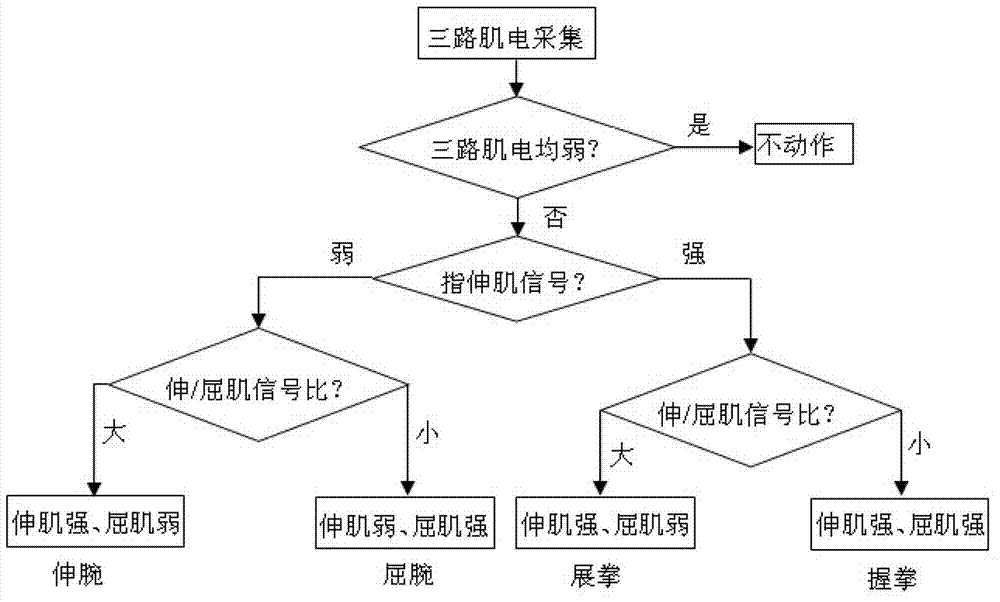
[0032] Since the surface electromyographic signal collected when the hand is not movin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com