

Novel lower limb joint mechanism of reclining-type Lower limb rehabilitation robot
A technology for rehabilitation robots and lower limbs, applied in gymnastics equipment, sports accessories, etc., can solve problems such as the length and limitation of transmission timing belts, and the inability to achieve good consistency in the movements of human lower limbs and mechanisms, achieving good consistency and facilitating separate optimization , the effect of preventing abnormal situations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
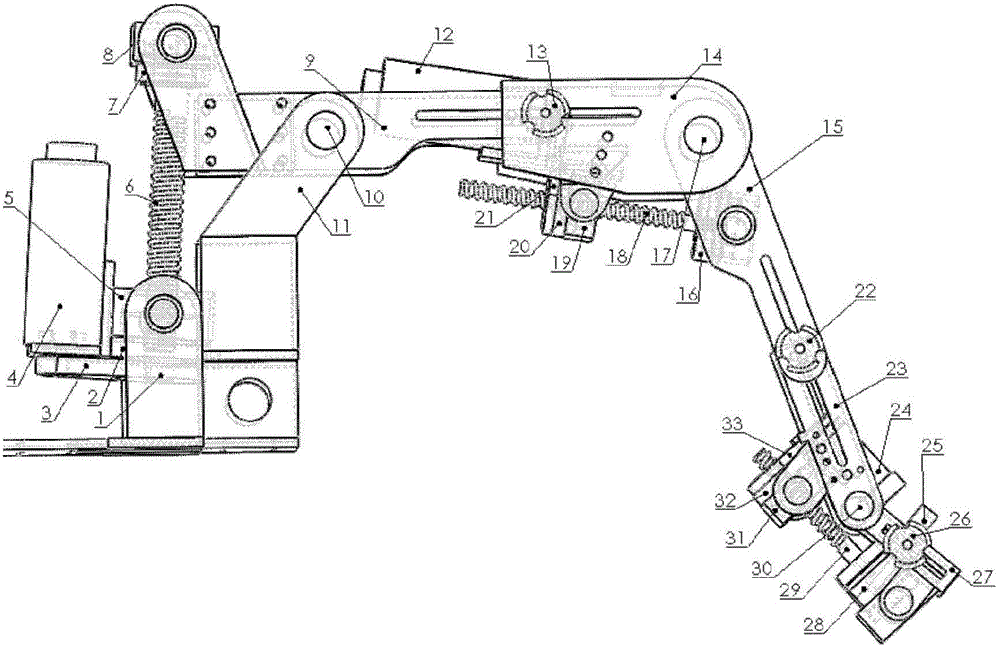
[0020] The design goal of the lower limb joint mechanism of the novel sitting-horizontal lower limb rehabilitation robot disclosed by the present invention is: the focus of hip joint design is to make the drive motor power smaller and produce better mechanical properties, and the maximum torque of the hip joint is 150NM. The rotation angle ranges from 0° to 70°; the focus of the design of the knee joint is to make the size of the overall mechanism smaller, the maximum torque of the knee joint is 65NM, and the range of rotation angle is 50° to 170°; The size of the mechanism is small, the maximum torque of the ankle joint is 5NM, and the rotation angle ranges from -40° to 40°.
[0021] figure 1 It is a structural diagram ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More