

Systematic calibration method of welding robot guided by line structured light vision sensor
A welding robot, vision sensor technology, applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problems of poor labor environment, complex process factors, high labor intensity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
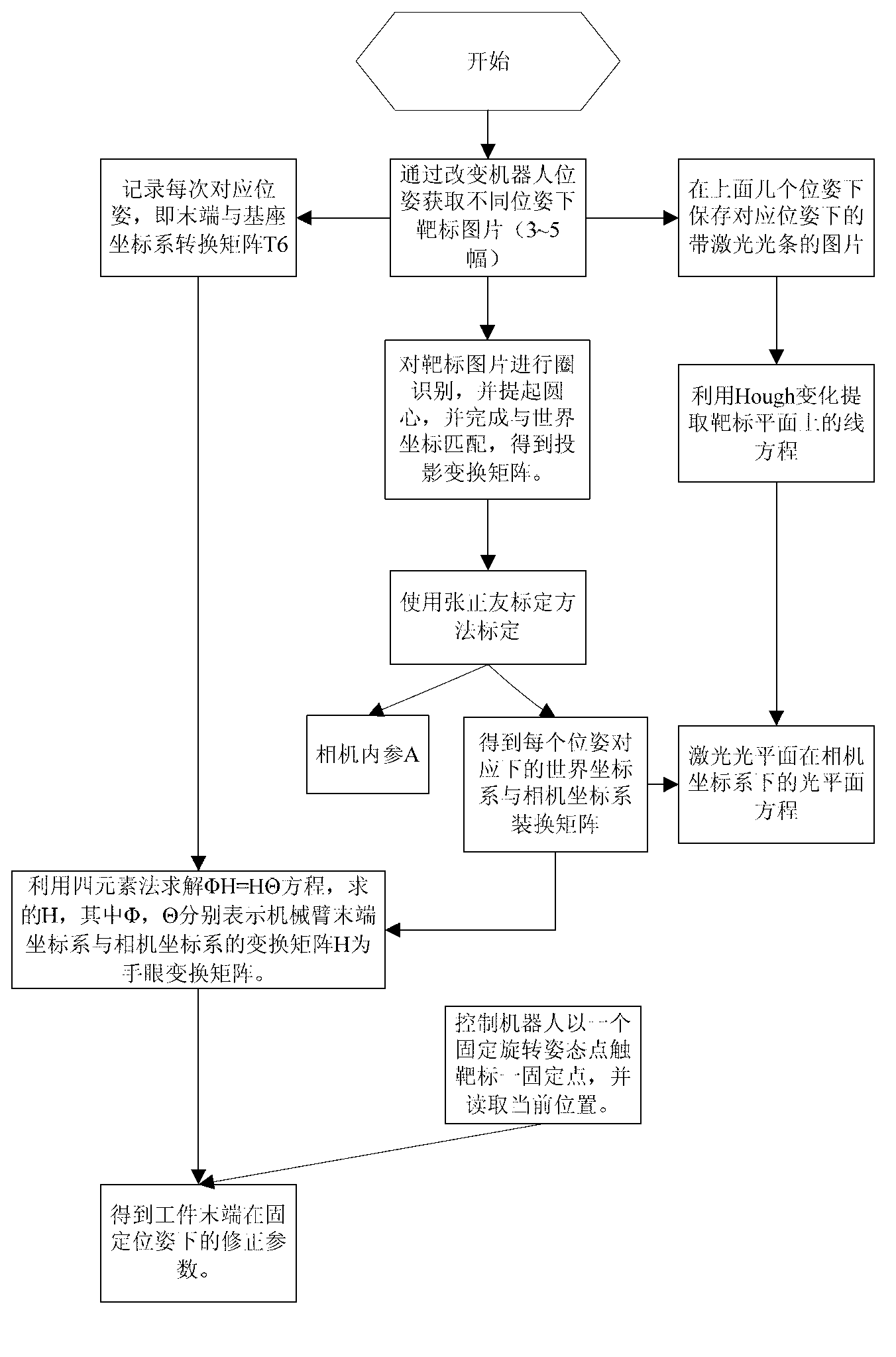
[0053] The purpose of the present invention is to overcome the shortcomings of the traditional line laser light plane equation and hand-eye calibration conditions, such as harsh conditions and cumbersome calibration steps, and propose a flexible, high-precision, fast-speed, good stability, strong real-time performance, simple method, and small amount of calculation. , Universal calibration method.
[0054] The present invention will be further described below in conjunction with drawings and embodiments.
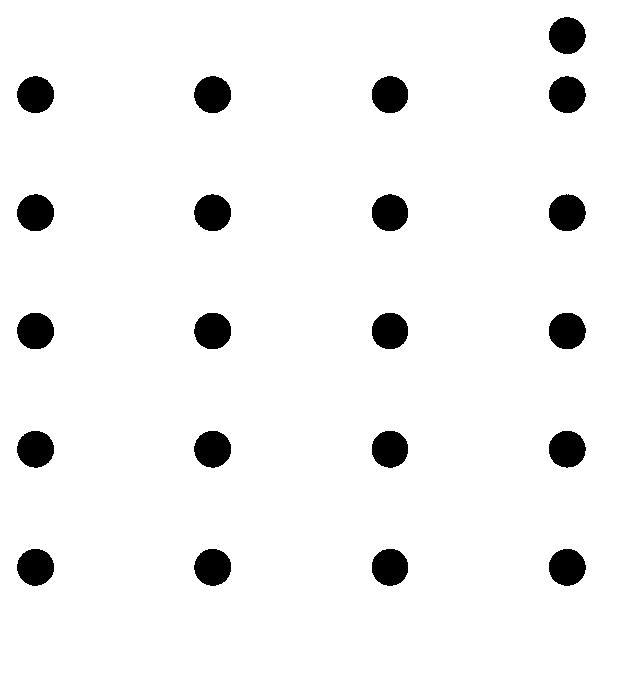
[0055] The present invention utilizes as image 3 The circular target shown can realize the rapid positioning of the center of the circle, and automatically match the world coordinates and pixel coordinates of the feature points of the circle center, which is conducive to the automation of camera internal parameter calibration; analyze the mathematical model of the linear structured light-guided manipulator tracking system, and introduce four The element method solves the h...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More