

Point cloud posture standardization-based method for extracting linear characteristic of point cloud
A feature extraction, point cloud line technology, used in special data processing applications, measuring devices, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
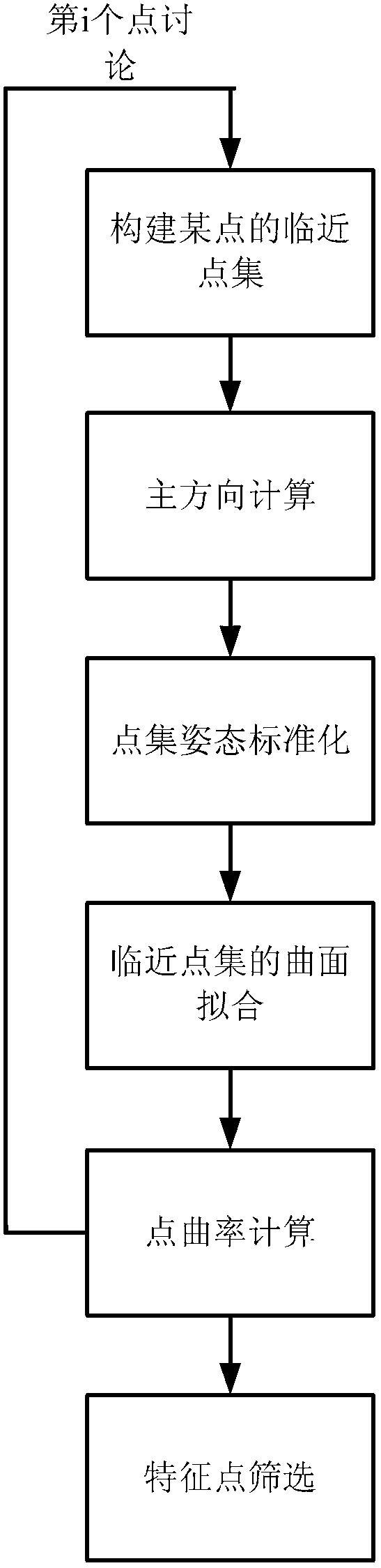
[0035] Specific implementation method: as follows figure 1 The shown method steps describe a concrete implementation.
[0036]The present invention is based on a point cloud line feature extraction method based on point cloud attitude standardization. The specific steps of the method are:
[0037] Step 1: Construct the adjacent point set of a certain point: KD-TREE algorithm is the application of the binary tree principle in the point cloud space. According to the coordinate distribution of the point cloud, the distribution of the original point cloud is subdivided into different regions. For coordinate information, the search for the nearest point can be realized directly according to the address information of the grouping area. Taking n points as an example, the time changes from n to log 2 n, can save a lot of time. According to the KD-TREE algorithm, a certain search area can be specified to quickly search for the set of adjacent points of the specified point.
[0038]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More