

Crop spraying positioning method based on binocular vision gridding partition matching algorithm
A technology of grid division and matching algorithm, applied in computing, image analysis, devices for capturing or killing insects, etc. Robustness and accuracy, the effect of reducing false matches, reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The preferred embodiments will be described in detail below in conjunction with the accompanying drawings. It should be emphasized that the following description is only exemplary and not intended to limit the scope of the invention and its application.
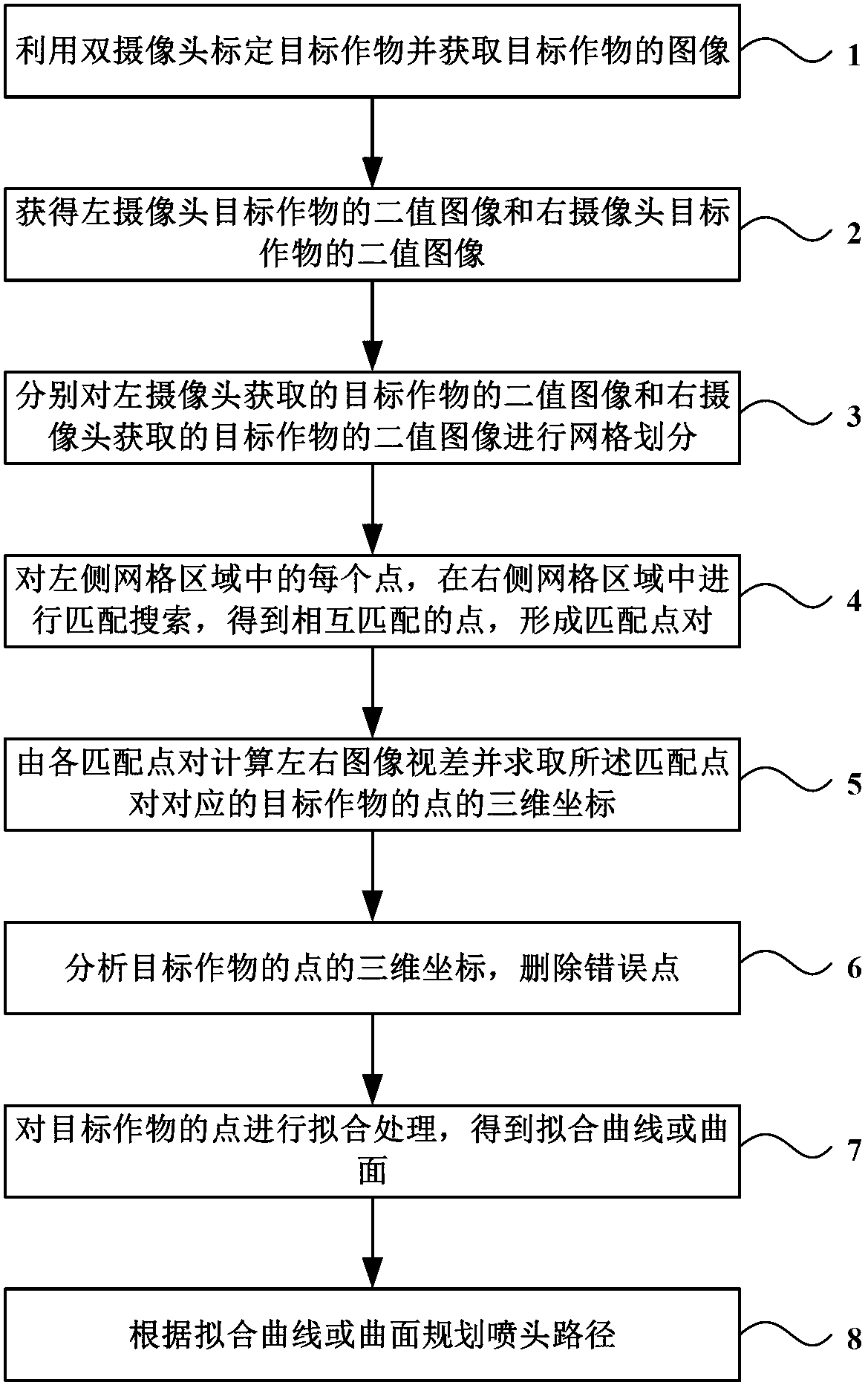
[0051] figure 1 It is a flow chart of crop spray positioning method based on binocular vision grid division matching algorithm. Such as figure 1 As shown, the crop spray positioning method based on the binocular vision grid division matching algorithm provided by the present invention includes:
[0052] Step 1: Use dual cameras to calibrate the target crop and obtain images of the target crop, and the dual cameras are respectively marked as the left camera and the right camera.
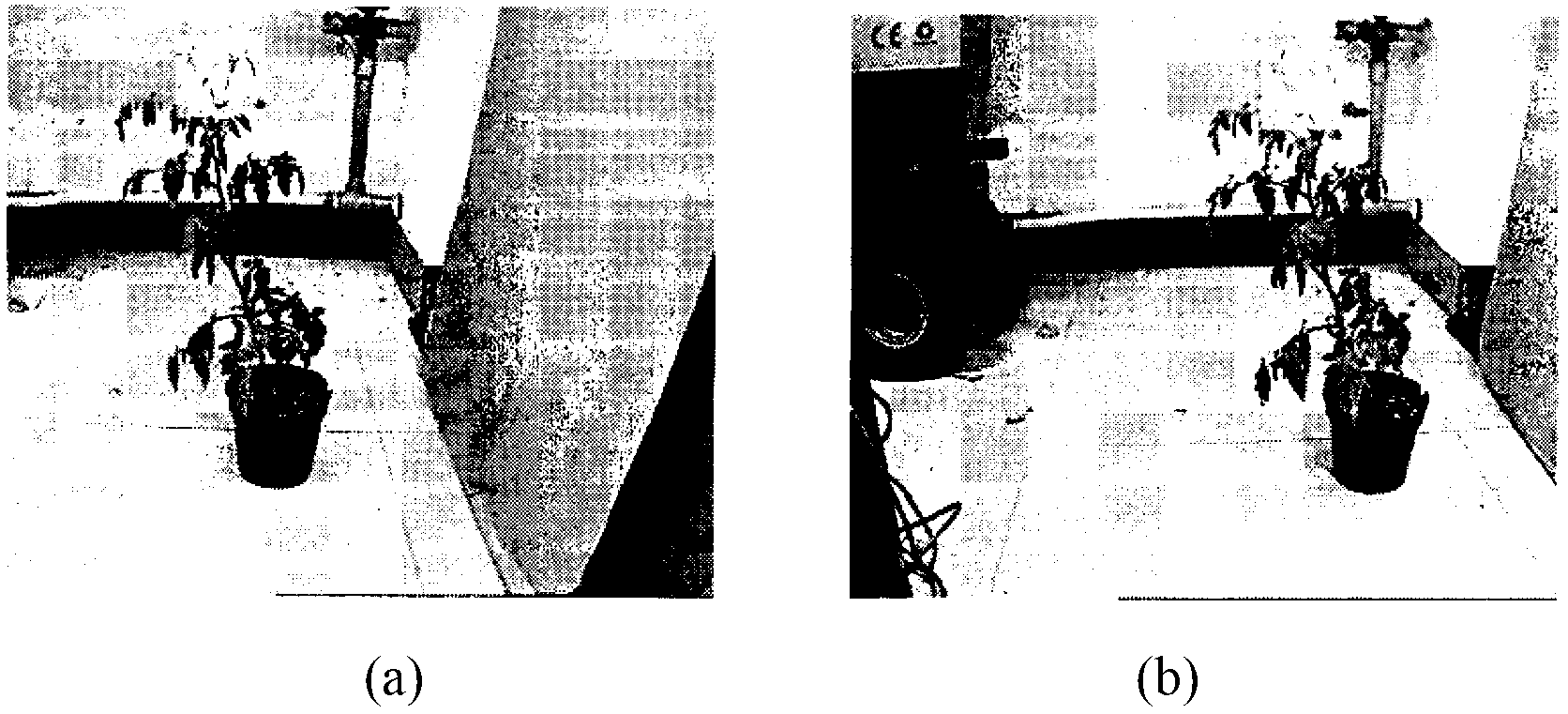
[0053] When arranging the left and right cameras, it should be ensured that the optical axes of the two cameras are parallel to each other and on the same horizontal plane. figure 2 It is a schematic diagram of using dual cameras to calib...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More