

Multi-camera visual perception system for UGV (Unmanned Ground Vehicle)
A visual perception and multi-camera technology, applied in the direction of two-dimensional position/channel control, etc., can solve the problems of limited field of view control, single perception algorithm, poor system scalability, etc., to ensure redundancy and reliability, algorithm Simple and reliable, the effect of large field of view
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] A kind of multi-camera unmanned vehicle visual perception system provided by the present invention is introduced below in conjunction with accompanying drawing and embodiment:
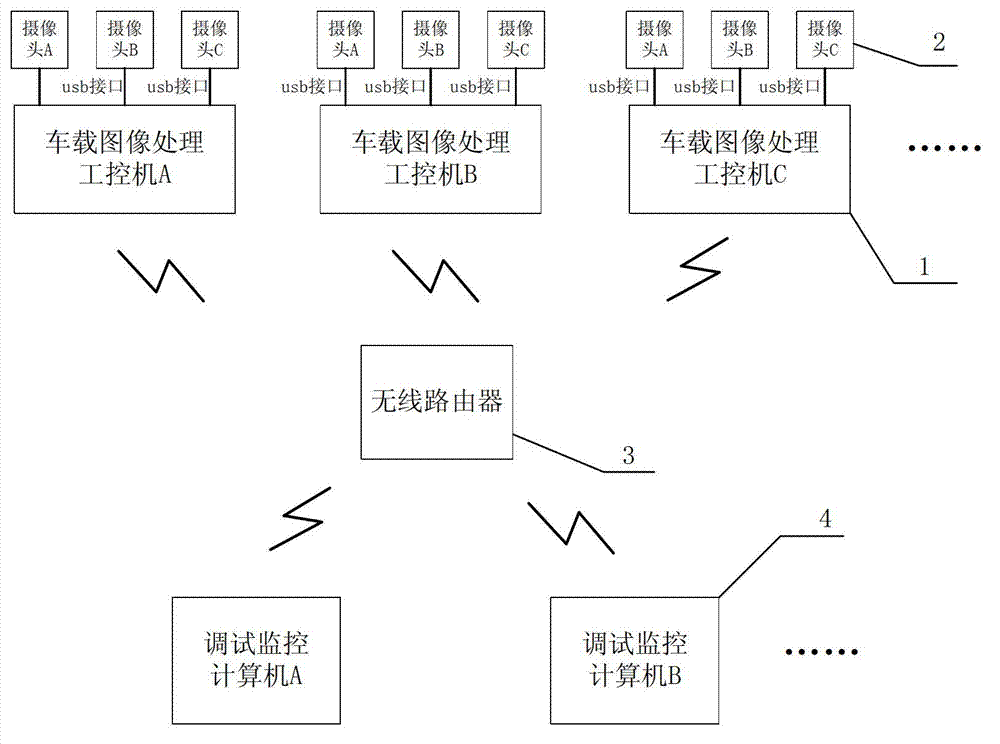
[0042] Such as figure 1As shown, a multi-camera unmanned vehicle visual perception system includes a plurality of vehicle-mounted image processing industrial computers 1, each of which is connected with three cameras 2; one or more debugging monitoring computers 4 are controlled by a wireless router 3 The control mode of the vehicle-mounted image processing industrial computer 2 may be redundant control or separate control.
[0043] Each vehicle-mounted image processing industrial computer 1 and the remote debugging monitoring computer 4 form a wireless local area network, and any computer in the wireless local area network can freely communicate with each other. The remote monitoring computer displays data and sends commands through the command line; displays the real-time image processing res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More