

Vibration suppression method for flexible manipulators
A technology of vibration suppression and flexible arm, which is applied in the field of vibration suppression of flexible arms to achieve the effect of suppressing transient vibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] The present invention will be described in further detail below in conjunction with the embodiments.
[0038] The parameters in the example are shown in the table below:
[0039]
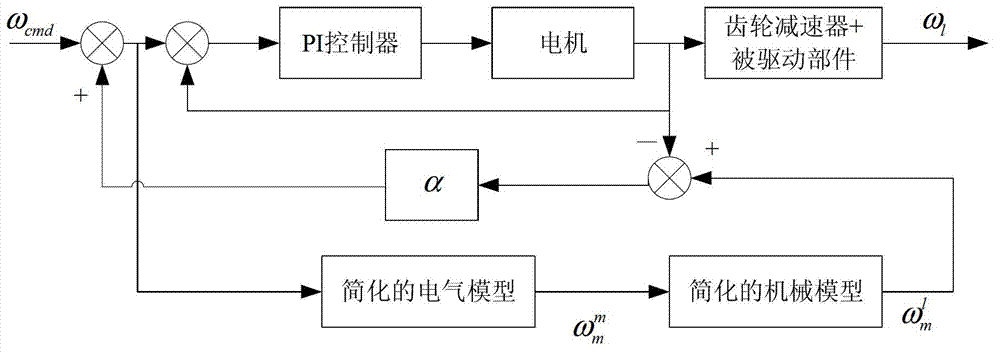
[0040] (1) The speed command ω is provided by the host computer or inside the drive cmd , for the reduced-order models of the servo drive and electrical components, respectively;
[0041] (2) The output current of the servo driver drives the motor to run, and the actual motor speed ω is obtained through the encoder detection m ;
[0042] (3) Calculate the motor speed in the model from the reduced-order model of the electrical components , and provides a reduced-order model of the mechanical component:
[0043] ω m m ω cmd m = 2 ξ e ω e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More