

Human-simulated mechanical arm in seven degrees of freedom
A technology of manipulators and degrees of freedom, applied in the field of manipulators, can solve the problems of heavy manipulators, low load capacity, and low integration, and achieve the effect of light weight, strong load capacity, and high integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
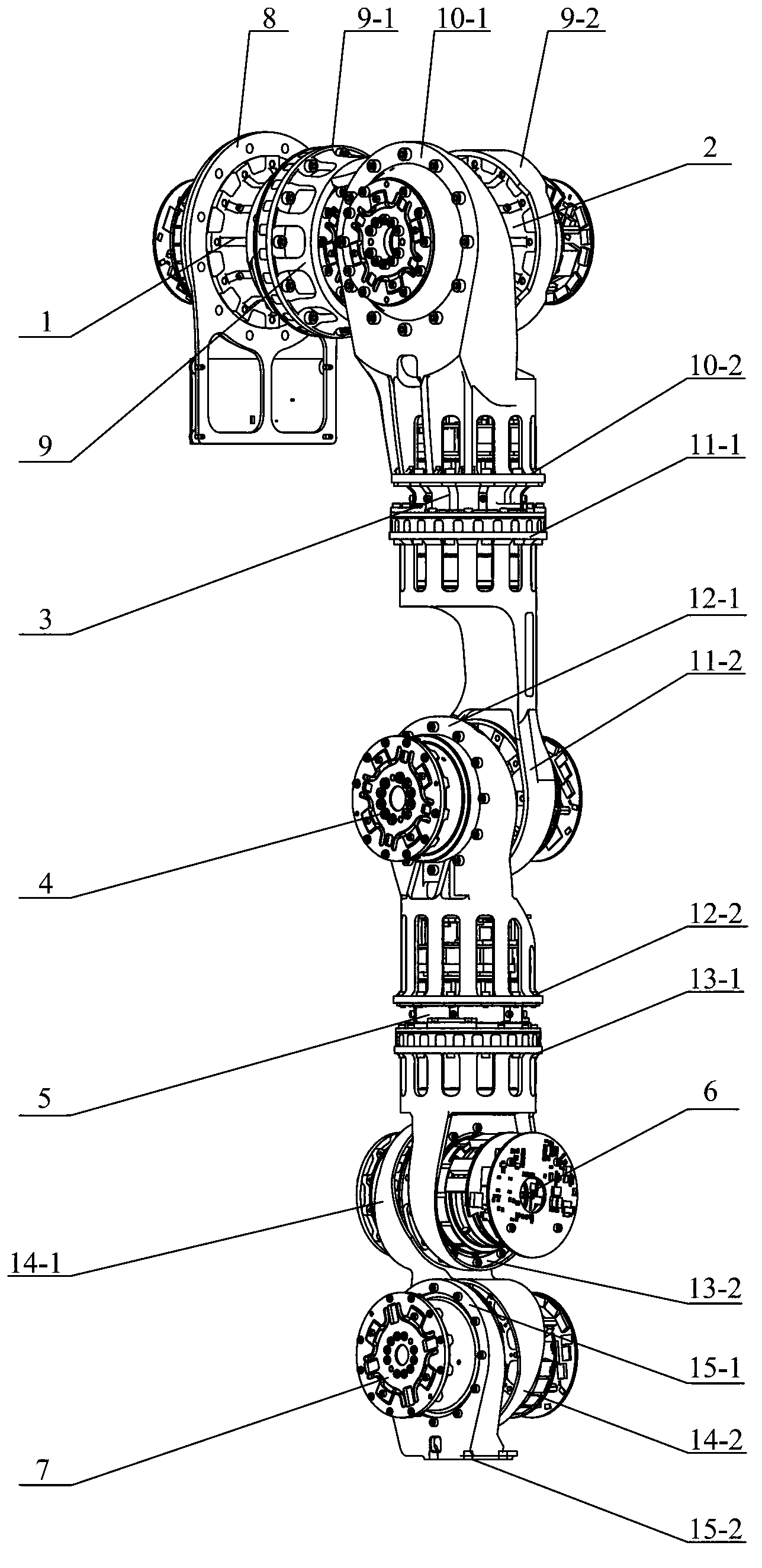
[0008] Specific implementation mode one: combine figure 1 , figure 2 , Figure 5a-5c as well as Figure 6a-Figure 6f Explain that a humanoid seven-degree-of-freedom mechanical arm in this embodiment includes a mechanical arm base 8, wires, seven arm levers, and seven mechatronic modular rotary joints; the seven The first boom 9, the second boom 10, the third boom 11, the fourth boom 12, the fifth boom 13, the sixth boom 14 and the seventh boom 15, the seven The mechatronic modular rotary joints are the first shoulder joint 1, the second shoulder joint 2, the first elbow joint 3, the second elbow joint 4, the first wrist joint 5, the second wrist joint 6 and the third wrist joint 7. The input end 1-1 of the first shoulder joint 1 is fixedly connected to the base 8 of the mechanical arm, the output end 1-2 of the first shoulder joint 1 is fixedly connected to the input end 9-1 of the first arm 9, and the first The output end 9-2 of the arm lever 9 is fixedly connected with ...
specific Embodiment approach 2
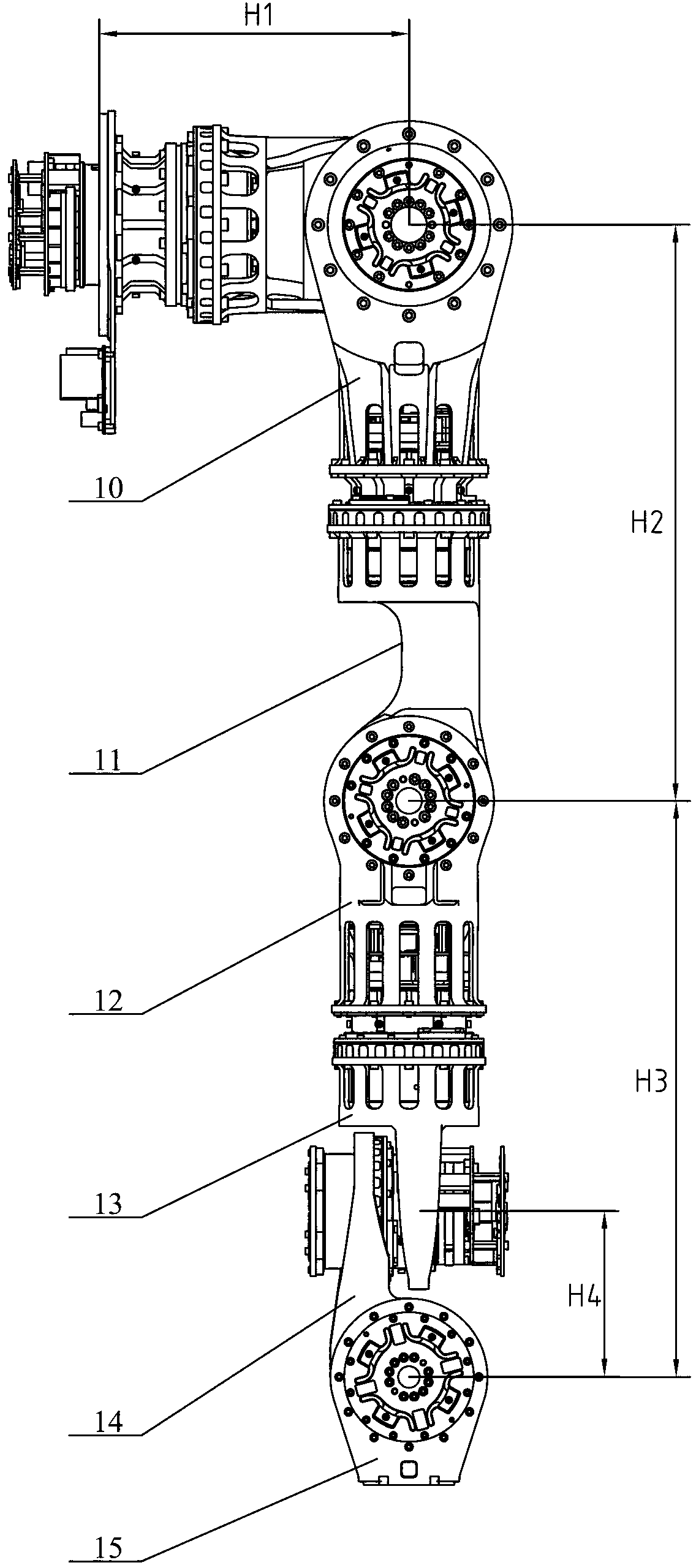
[0009] Specific implementation mode two: combination figure 1 , figure 2 , Figure 6a , Figure 6c and Figure 6f Explain that the distance H1 between the manipulator base 8 and the rotation axis 2-3 of the second shoulder joint 2 in this embodiment is 220 mm, and the rotation axis 2-3 of the second shoulder joint 2 and the rotation axis 2 of the second elbow joint 4 The distance H2 of 4-3 is 400mm, the distance H3 between the rotation axis 4-3 of the second elbow joint 4 and the rotation axis 7-3 of the third wrist joint 7 is 400mm, and the rotation axis 6-3 of the second wrist joint 6 and The distance H4 between the rotation axes 7-3 of the third wrist joint 7 is 115 mm. The undisclosed technical features in this embodiment are the same as those in the first embodiment.
specific Embodiment approach 3
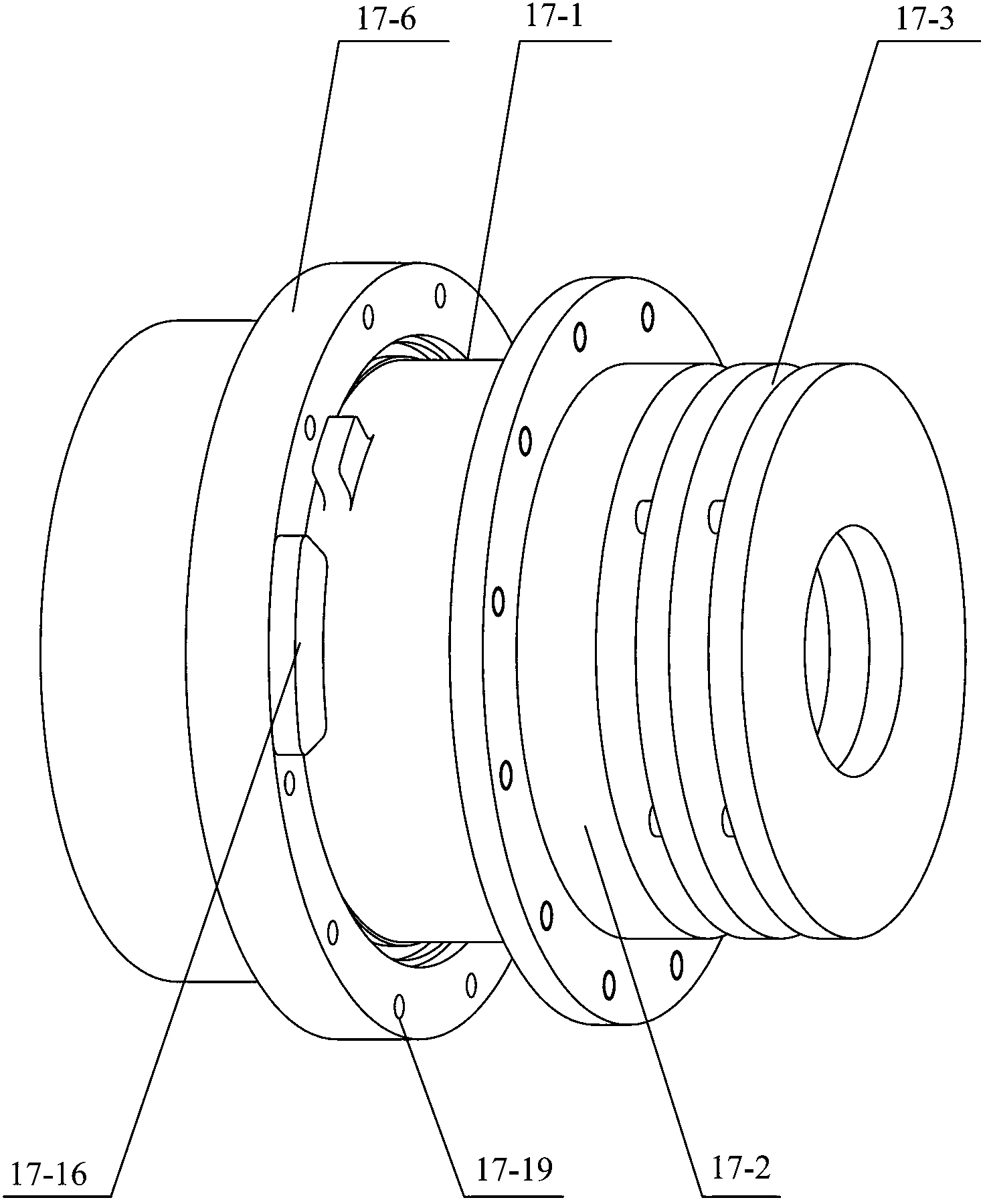
[0010] Specific implementation mode three: combination image 3 and Figure 4 Explain that each mechatronic modular rotary joint in this embodiment includes a mechanical system 17-1, a power-off brake 17-2, an electrical system 17-3, and a sensor system 17-4, which are sequentially connected and integrated. The structure is: the mechanical system 17-1 includes the joint fixed end 17-5, the joint output end 17-6, the joint transmission device 17-7, the cross bearing 17-8, the first deep groove ball bearing 17-9, the second deep groove ball bearing Groove ball bearing 17-10 and harmonic reducer 17-11, one end of the joint fixed end 17-5 is arranged in the joint output end 17-6, and the joint fixed end 17-5 and the joint output end 17-6 pass through a cross The cross bearing 17-8 is connected, the joint transmission device 17-7 is arranged in the joint fixed end 17-5, and the first deep groove ball bearing 17-9 and the second joint transmission device 17-7 are passed between the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More