

Monocular machine vision-based non-contact three-dimensional scanning method
A machine vision and three-dimensional scanning technology, applied in the field of three-dimensional scanning, can solve the problems of difficult extraction of feature points, difficulty in improving scanning speed, distortion, etc., and achieve the effect of easy display and analysis, good extraction effect and small amount of data.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention will be further described in detail below in conjunction with specific embodiments, which are explanations of the present invention rather than limitations.
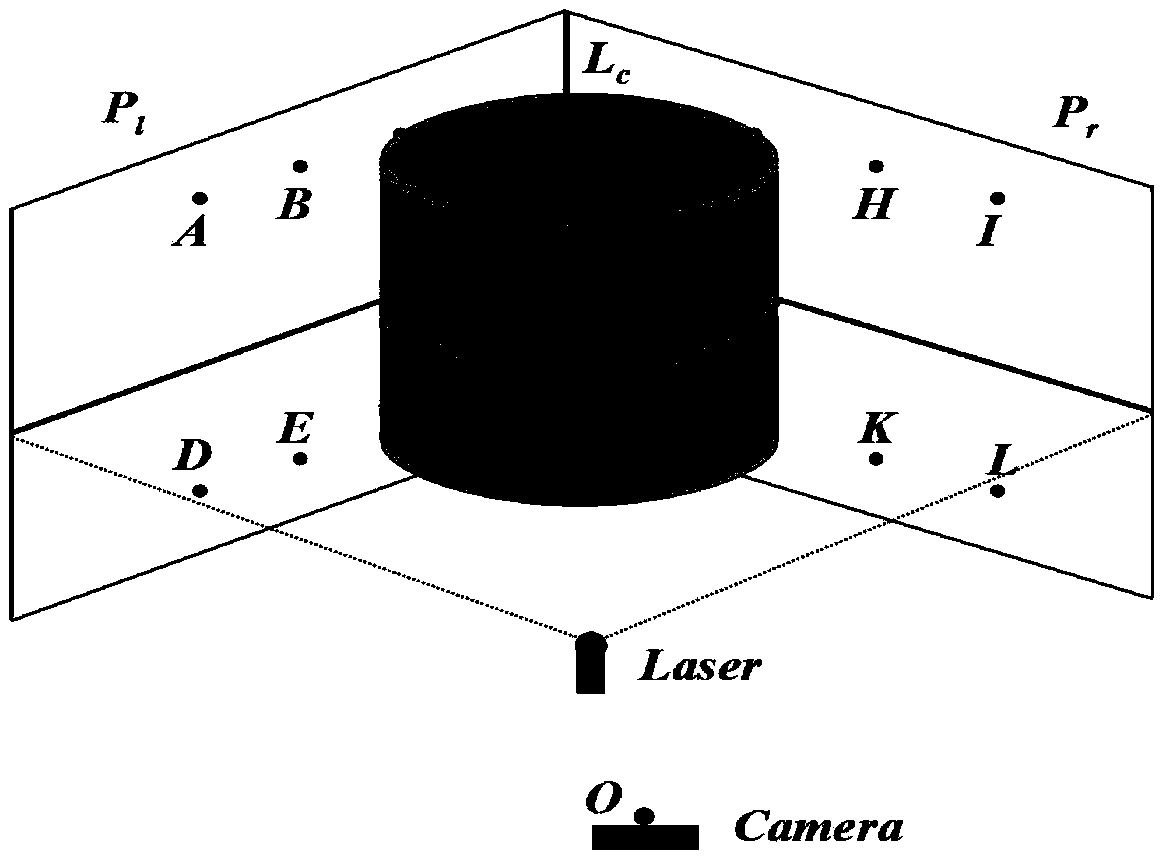
[0049] 1, the required hardware equipment of the present invention:
[0050] It includes a camera, a line laser pointer, and a self-made background board according to the object to be scanned.
[0051] Requirements for the background plate: the surface is as flat as possible, the size of the left and right plates is the same, and the positions of the listed calibration points are as follows.
[0052] Specifically, the background board is divided into a left calibration board and a right calibration board, and several uniformly distributed coordinate points are arranged symmetrically on the left calibration board and the right calibration board;
[0053] The setting of the coordinate points is as follows: there are 12 coordinate points, and there are six coordinate points on the left calibrat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More