

Portable and wearable exoskeleton robot for lower limb recovery and walking aid
A kind of exoskeleton robot, portable technology, applied in the field of medical equipment, can solve the problem that the driving mechanism is bulky and not suitable for wearing
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
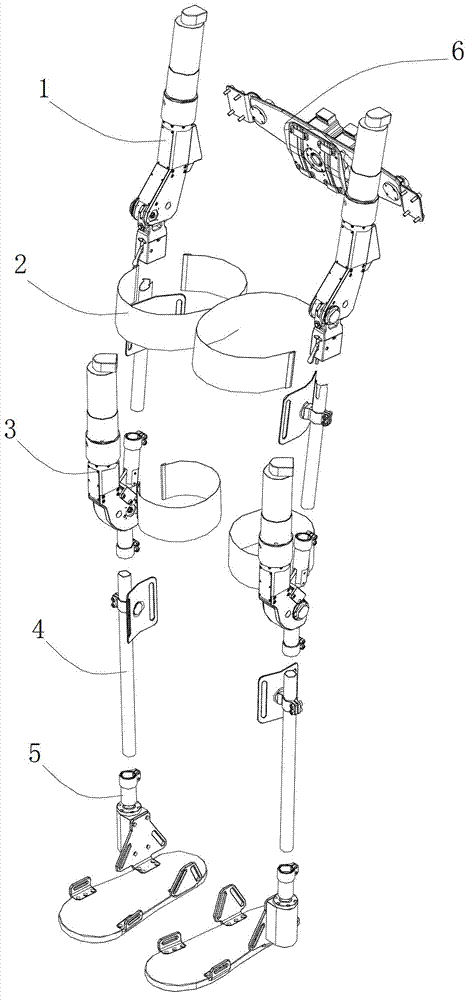
[0031] Please refer to figure 1 and Figure 16 to Figure 18 , the portable wearable lower limb rehabilitation and walking aid exoskeleton robot in this embodiment includes a hip joint part 1, a thigh support part 2, a knee joint part 3, a calf support part 4, and an ankle joint foot part which are sequentially connected to form a complete leg part. Part 5, and the lumbar support part 6 fixedly connected with the hip joint part 1.
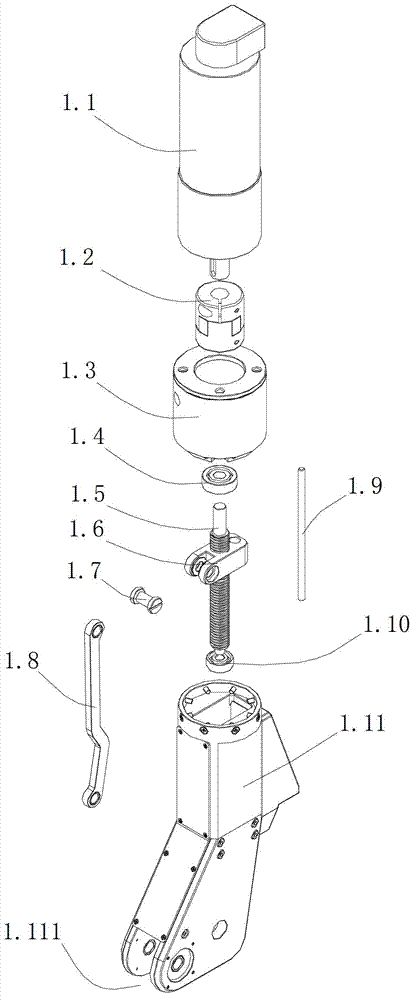
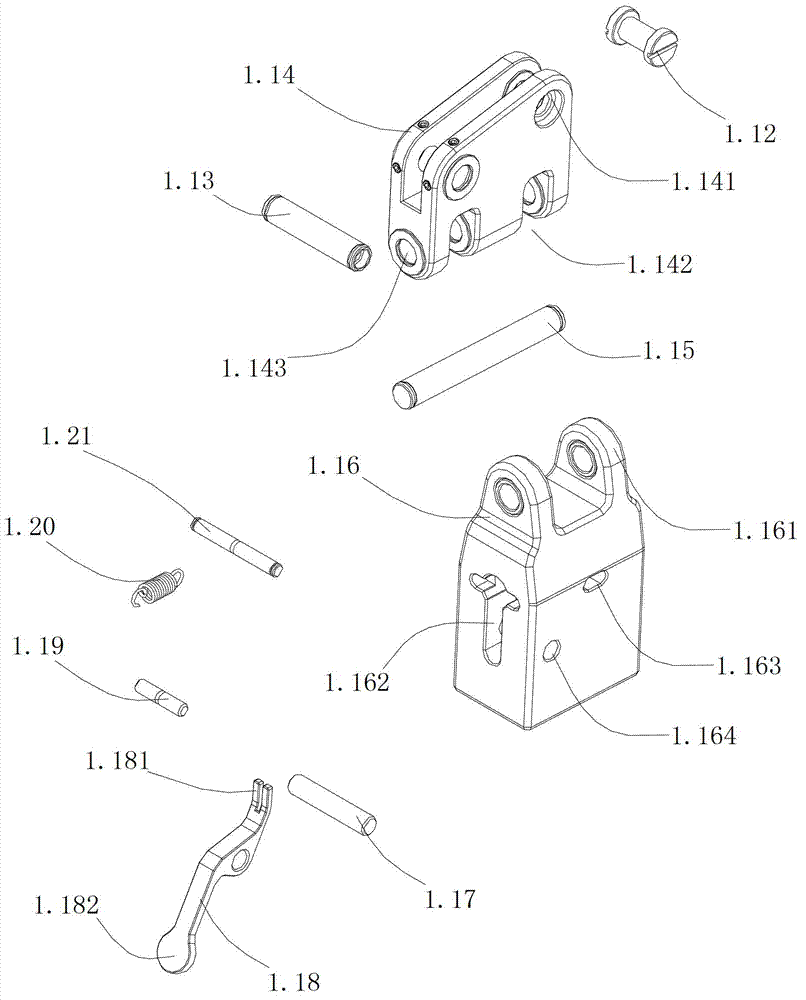
[0032] Please refer to figure 2 with image 3 , The hip joint component 1 includes a first driving motor 1.1, a first coupling 1.2, a first motor seat 1.3, a first bearing 1.4, a first screw shaft 1.5, a first screw slider 1.6, a first connecting rod shaft 1.7, The first connecting rod 1.8, the first guide rod 1.9, the second bearing 1.10, the hip joint supporting part 1.11, the second connecting rod shaft 1.12, the hip joint rotating shaft 1.13, the hip joint moving part 1.14, the leg moving part rotating shaft 1.15, Leg moving part 1.16, hand...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More