

Collaborative initial alignment method based on multiple-inertia-unit informational constraint
A technology of initial alignment and group information, which is applied in the direction of navigation, measuring devices, instruments, etc. through speed/acceleration measurement, which can solve the problems of affecting the accuracy of positioning, inapplicability, and high accuracy of the main inertia group, and achieve significant improvement. Effects of alignment accuracy, improved accuracy and speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
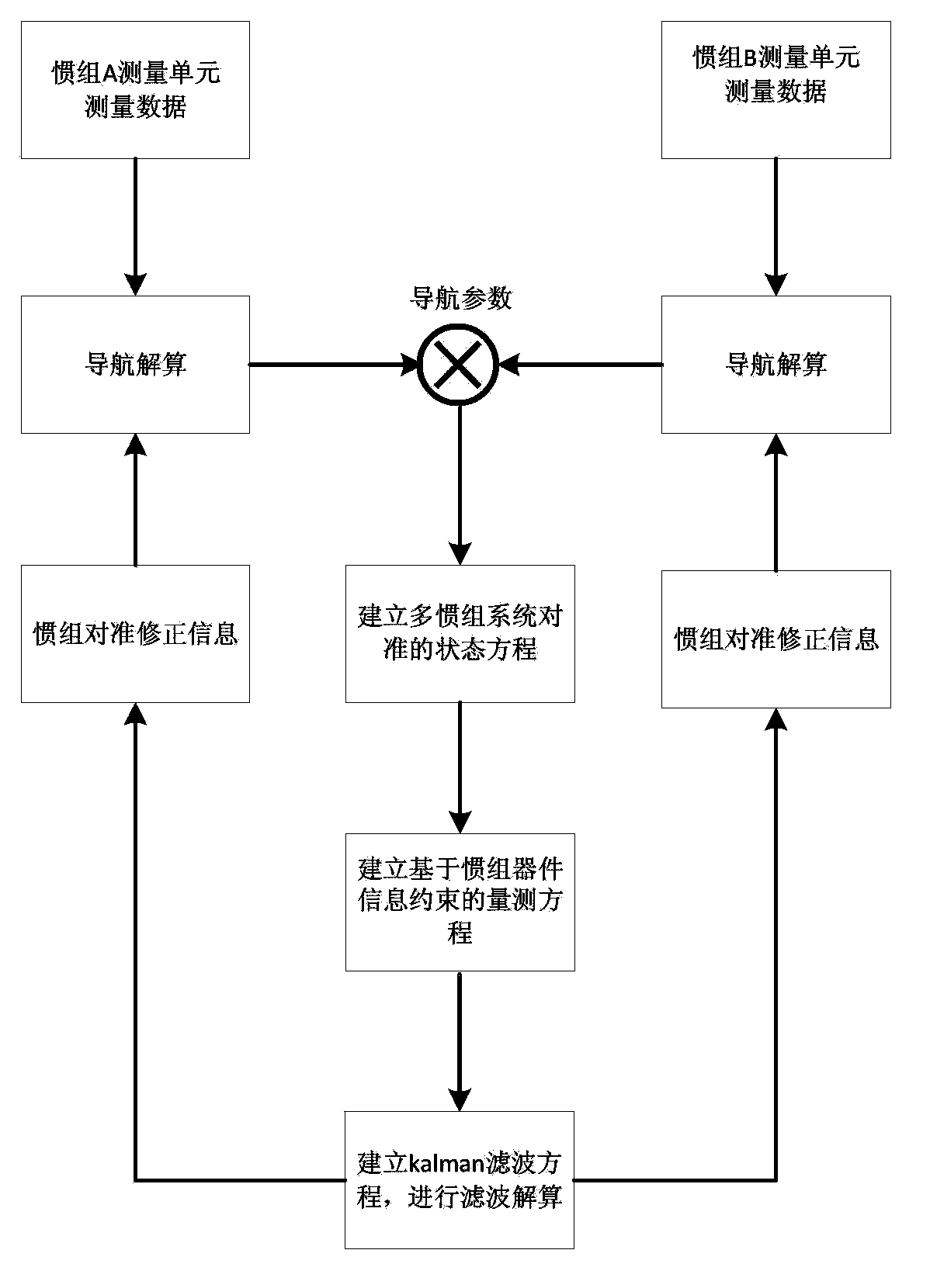
[0023] The present invention is a collaborative initial alignment method based on information constraints of multiple inertial groups. For a system composed of two inertial groups, the two inertial groups are respectively recorded as inertial group A and inertial group B. The method flow is as follows figure 1 shown, including the following steps:
[0024] Step 1. Establish a single inertial group alignment mathematical model. Inertial group A and inertial group B use their respective inertial measurement units to measure the acceleration and angular velocity information of the carrier, and perform strapdown inertial navigation solution to obtain inertial group A and inertial group B. Inertial group B navigation parameter information.
[0025] Establish a single inertial group alignment mathematical model, including state equations and measurement eq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More