

Method for adjusting control parameters of follow-up device of mechanical device
A technology of follow-up device and adjustment method, which is applied in general control system, control/adjustment system, adaptive control, etc., can solve the problem of blind adjustment of the control parameters of the follow-up controller, time-consuming and laborious debugging of the follow-up device, and poor control performance. Difficult to meet and other problems, to achieve the effect of improving static and dynamic performance, reducing blindness, reducing volume and weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
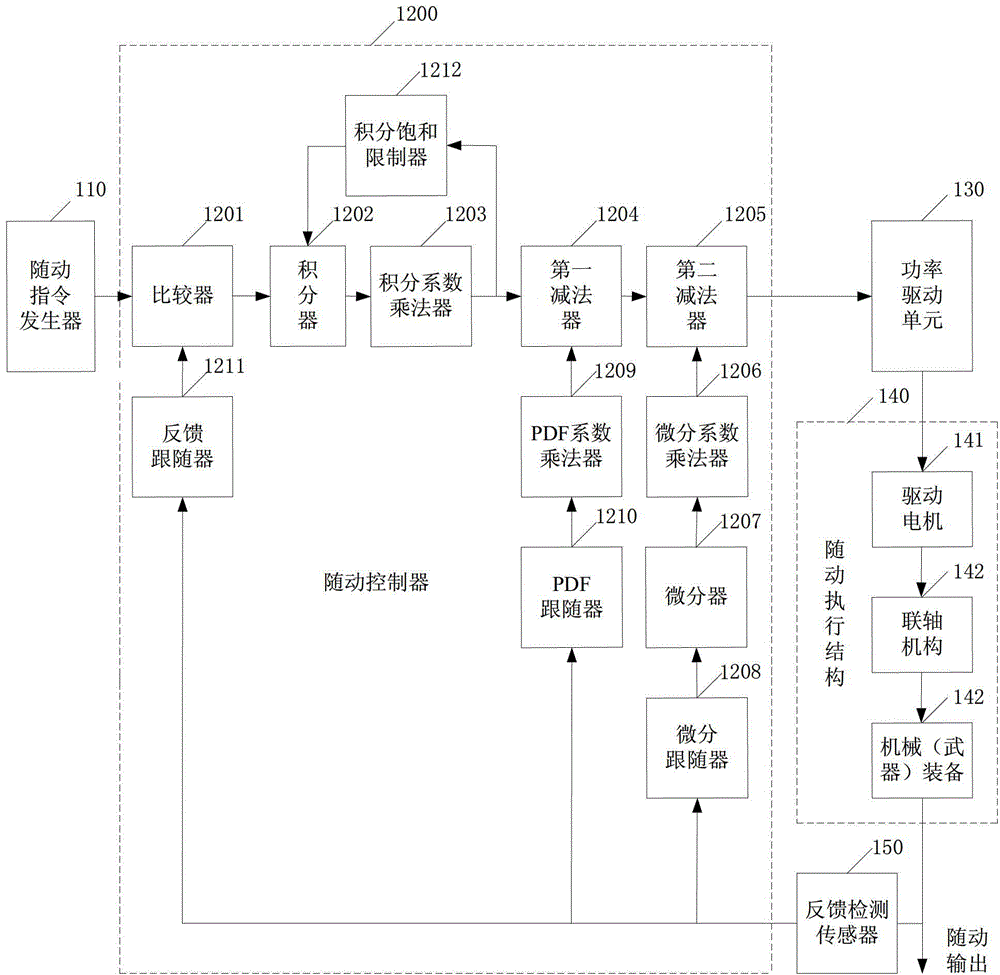
[0030] In order to deepen the understanding of the present invention, below in conjunction with appendix figure 1 And attached figure 2 Specific embodiments of the present invention are further described in detail.
[0031] as attached figure 1 Shown is a block diagram of the follow-up device for mechanical equipment according to the embodiment of the present invention. Described follow-up device is made up of follow-up command generator 110, follow-up controller 120, power drive unit 130, follow-up actuator 140 and feedback detection sensor 150, follow-up command generator 110, follow-up controller 120, power Drive unit 130, follow-up actuator 140 and feedback detection sensor 150 are circularly connected clockwise in order to form a closed-loop device; said follow-up controller 120 is composed of comparator 1201, integrator 1202, integral coefficient multiplier 1203, first subtraction 1204, second subtractor 1205, differential coefficient multiplier 1206, differentiator ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More