

Self-learning wheel chair control method based on change of gravity center of human body
A technology of changing the center of gravity and control method, applied in the direction of self-adaptive control, patient's chair or special transportation tool, general control system, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
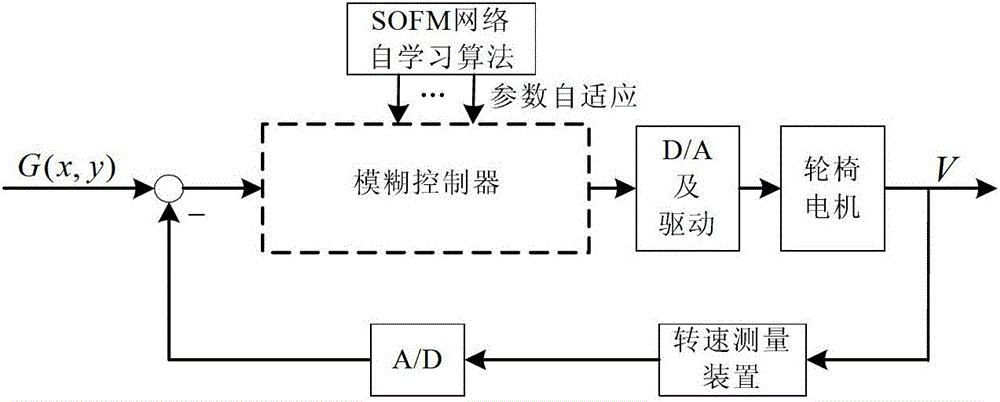
[0107] Based on the self-learning wheelchair control method based on the change of the center of gravity of the human body, the inventor has designed an intelligent wheelchair system that is controlled according to the change law of the center of gravity (such as Figure 7 shown), where:
[0108] M1-M4 are four DC servo motors powered by +24V;
[0109] DIR1-DIR4 is the direction of movement of the four wheels. When the wheelchair moves forward, the motor rotates forward, and when the wheelchair moves backward, the motor rotates reversely;
[0110] PWM1-PWM4 are the PWM (Pulse Width Modulation) pulse width modulation channel control signals of the four motors;
[0111] A / D is an analog-to-digital converter connected to the motion controller;
[0112] The basic working principle is as follows:
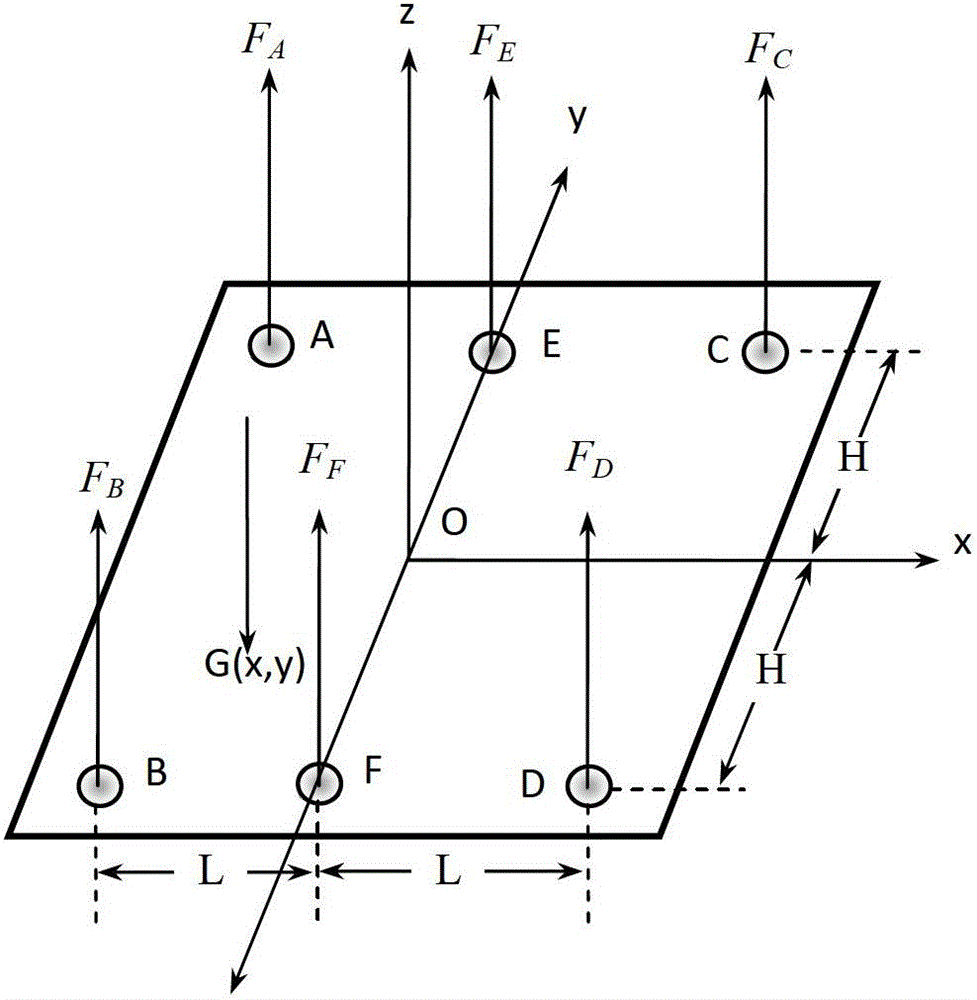
[0113] The wheelchair seat uses 6 pressure sensors to collect the force value of each point under the user's sitting posture, and sends the voltage signal corresponding to the pressur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More