

High-order nonsingular terminal slip mode control method for two-stage magnetic head positioning system
A non-singular terminal, positioning system technology, applied in the field of high-order non-singular terminal sliding mode control, can solve the problems of unconsidered influence, system error, and high controller order.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
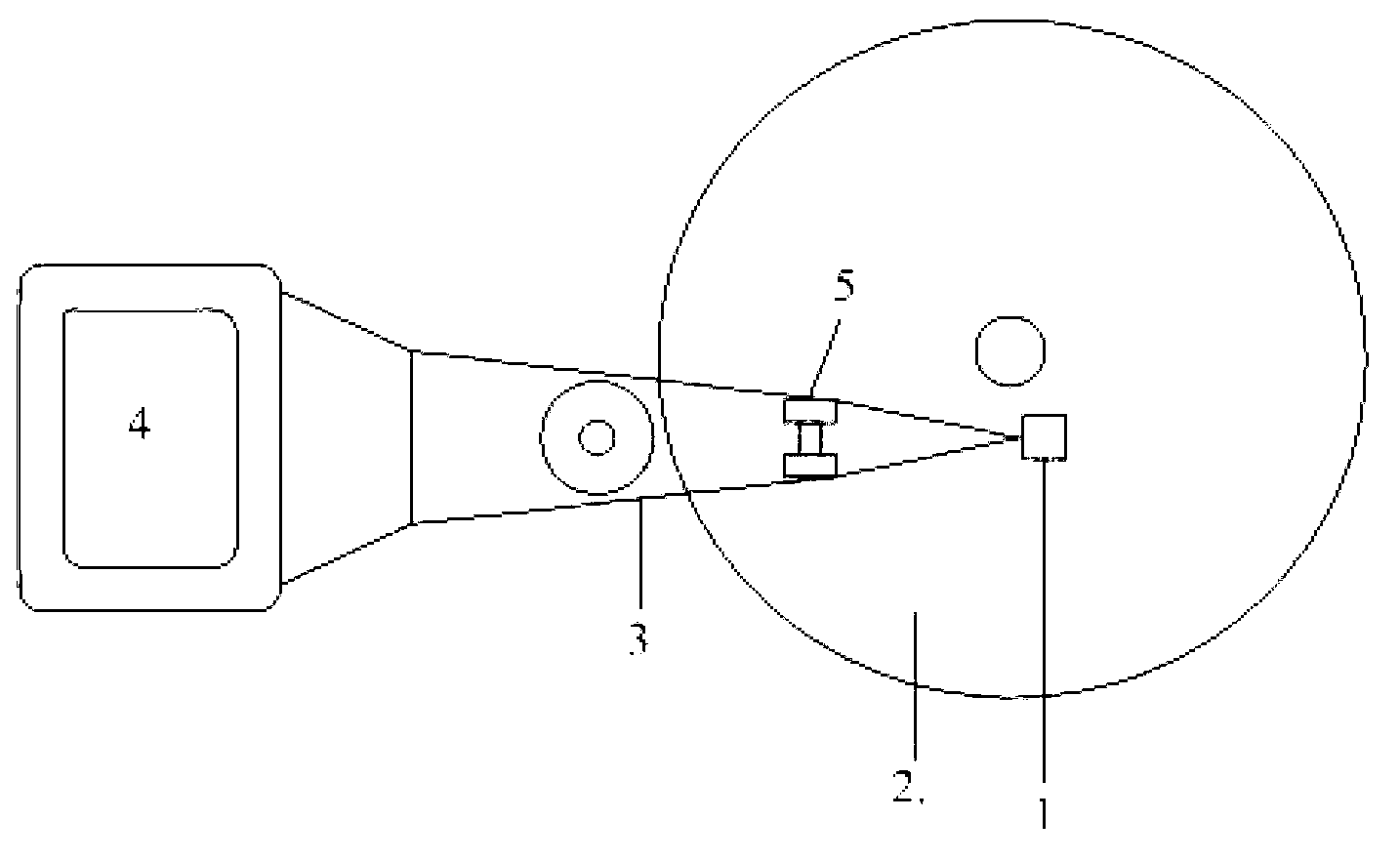
[0125] refer to figure 1 The structure diagram of the two-stage drive hard disk drive shown is mainly composed of five parts: magnetic head 1, magnetic disk 2, reading arm 3 (big arm and small arm), voice coil motor 4 and piezoelectric actuator 5.
[0126] Technical principle of the present invention:
[0127] (1) Establishment of the dynamic model of the two-stage system of the flexible digital access arm
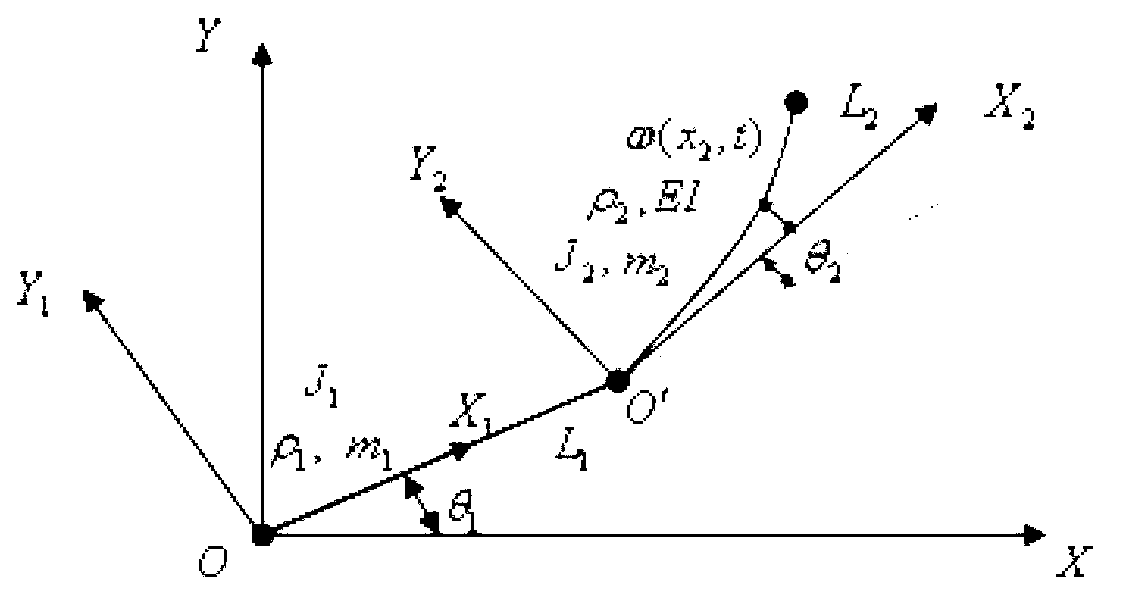
[0128] for figure 1 As shown in the two-stage magnetic head positioning system, it is assumed that the big arm of the reading arm 3 is rigid, driven by the voice coil motor 4, and the arm length is L 1 , the moment of inertia is J 1 ; The small arm of the digital arm 3 is assumed to be flexible, driven by the piezoelectric actuator 5, and the arm length is L 2 , the moment of inertia is J 2 ; At the same time assuming that the mass of the two arms is uniformly distributed, their linear densities are ρ 1 ,ρ 2 , the elastic coefficient at the joint between the two arm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More