

Passive gravity compensation branched chain of spatial parallel mechanism
A technology of gravity compensation and branch chain, which is applied in the direction of metal processing machinery parts, large fixed members, metal processing equipment, etc., can solve the problems of complex structure, difficult practical application, and complicated control of passive compensation devices, so as to avoid redundant drive problems , Avoid movement interference, high space rigidity effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
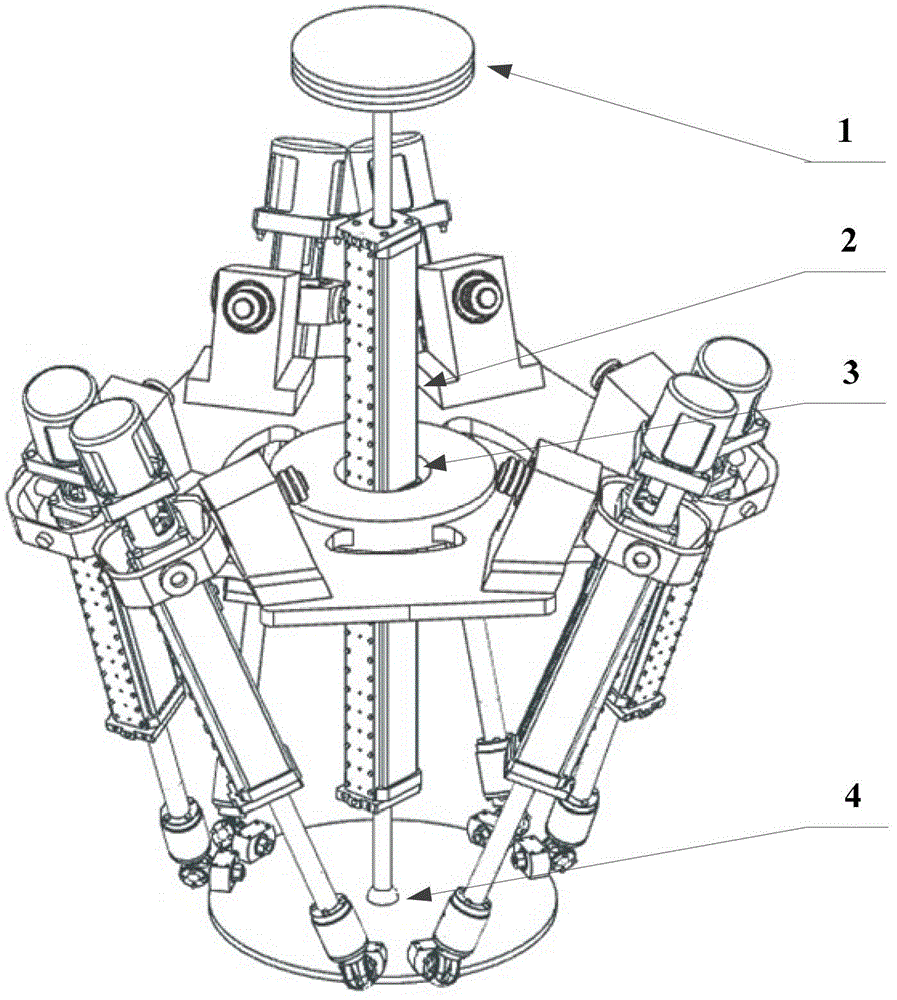
[0021] Such as figure 1 As shown, a passive gravity compensation branch chain of a space parallel mechanism in the present invention includes a counterweight 1, a bidirectional synchronous telescopic branch chain 2, a middle Hooke hinge 3 and a ball hinge 4, and the middle section of the outer rod of the bidirectional synchronous telescopic branch chain 2 passes through The middle Hooke hinge 3 is connected to the static platform of the space parallel mechanism, the rotation center of the middle Hooke hinge 3 coincides with the geometric center of the static platform, the counterweight 1 is fixedly connected to one end of the two-way synchronous telescopic branch chain 2, and the two-way synchronous telescopic branch chain 2 The other end is connected to the moving platform of the parallel mechanism through the ball joint 4; the cente...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More