In order to obtain better
breaking capacity and larger control capacity, at present, most of the contactors on the market adopt a direct drive method in which the electromagnetic mechanism directly drives the moving contact to move linearly, and the moving contact of the
contact system usually adopts double contacts. The structural form of the moving contact bridge, this kind of direct-acting contactor has the following defects: First, because the design requires a large
stroke of the moving contact to move in a straight line, there must be a gap between the moving contact and the static contact of the direct-acting contactor. Keep a large enough opening distance, and the
stroke ratio determined by the direct drive method can only be 1:1, so the stroke of the moving iron core of the electromagnetic mechanism is also large, resulting in the
energy loss of the double-coil electromagnetic mechanism in the on state. High consumption, complex structure, difficult to replace, high cost
Second, the driving force provided by the electromagnetic mechanism for the moving iron core is large, and the large
impact force not only causes excessive vibration and
noise during the connection / breaking process of the
contact system, but also causes the volume and
energy consumption of the electromagnetic mechanism to be large. reason
Third, since the moving direction of the moving iron core of the electromagnetic mechanism is consistent with the moving direction of the moving contact of the contact
system, the ratio of length, width and height of the contactor product is unbalanced, which is not conducive to the
miniaturization of the product
Fourth, the direct drive method is difficult to intervene in multivariate control, and cannot meet the needs of modern
switchgear for the development of multi-functional contactor technology such as circuit breakers
Since the work done by the electromagnetic mechanism on the driving contact
system cannot be reduced, this patent objectively does not contribute to solving the problem of "the electromagnetic mechanism is large in size and
energy consumption, and there is corresponding
power loss and heat
radiation". On the contrary, the electromagnetic An increase in the electromagnetic driving force of the mechanism (especially in the case of a 5-fold increase) leads to a decrease in the mechanical performance of the electromagnetic mechanism and contact
system and / or increases manufacturing difficulties
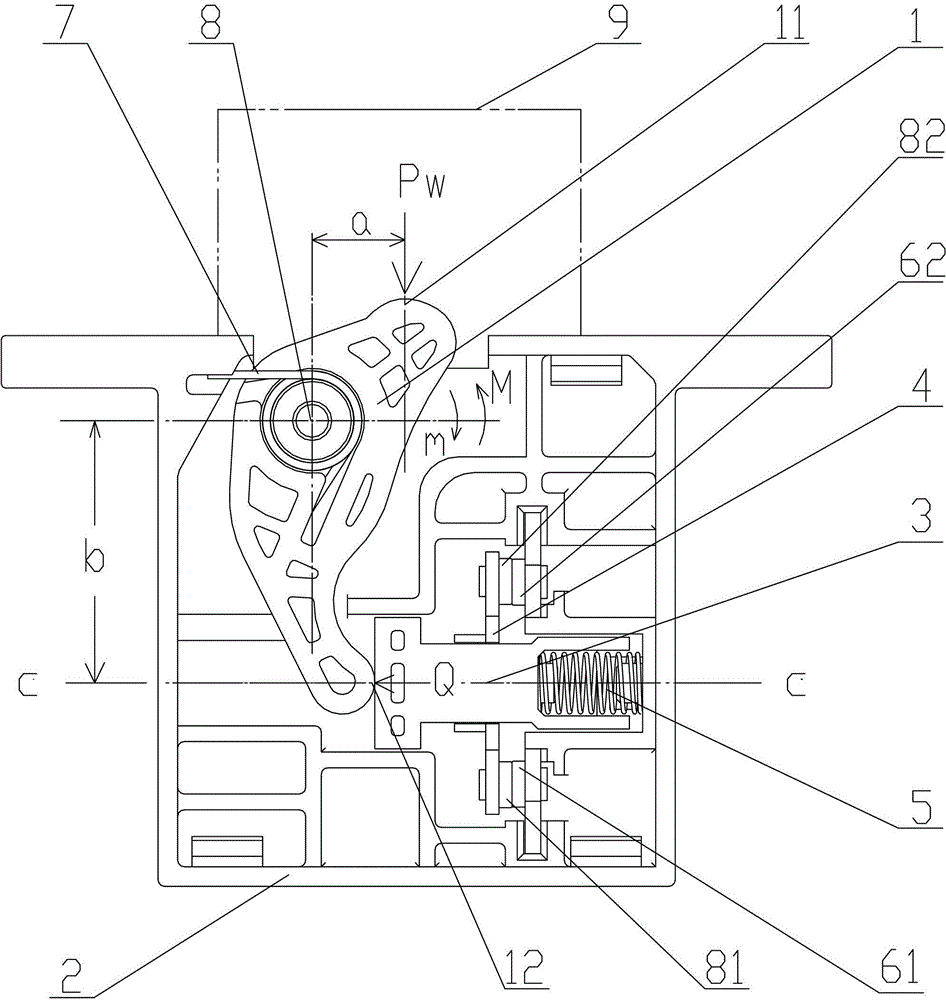
Moreover, since the pressure on the active end of the
rocker arm can only come from the electromagnetic mechanism located above the active end, the pressure on the active end of the
rocker arm can only make the active end move from top to bottom, and this movement can only drive the passive end and the contactor. The head support moves from bottom to top. Therefore, if the patent wants to achieve "when the active end of the
rocker arm is pressed, its passive end drives the contact support to move downward", it is necessary to add a steering mechanism with driving force, and a steering mechanism with additional driving force will inevitably lead to more complex structures
In addition, when the moving contact bridge is in contact with the static contact, since the active end of the rocker arm is pressed (that is, the electromagnetic mechanism exerts pressure on the active end of the rocker arm), as long as the electromagnetic mechanism does not release the
pressure action on the active end of the rocker arm, It is impossible to break the moving contact bridge and the static contact, so no matter how many active ends or passive ends are added to the rocker arm, the structure of this patent restricts it from intervening in other control inputs except for one control input of the electromagnetic mechanism. Make it impossible to achieve multivariate control through the rocker arm
In addition, because the connection between the passive end of the rocker arm and the contact support contact connection deviates from the symmetrical center of the movable contact bridge, the elastic force line of the return spring also deviates from the symmetrical center of the movable contact bridge. This structure will cause the movement of the movable contact bridge Decrease in performance, contact performance of moving contact and static contact, shorten product life



 Login to View More
Login to View More  Login to View More
Login to View More