

Method for constructing central pattern generator (CPG) control network topology structure of biped robot
A biped robot and control network technology, which is applied in the field of biped robot CPG control network topology construction, can solve problems such as complex optimization, difficulty in obtaining good results, and long optimization time, so as to reduce complexity and control network structure reasonable effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
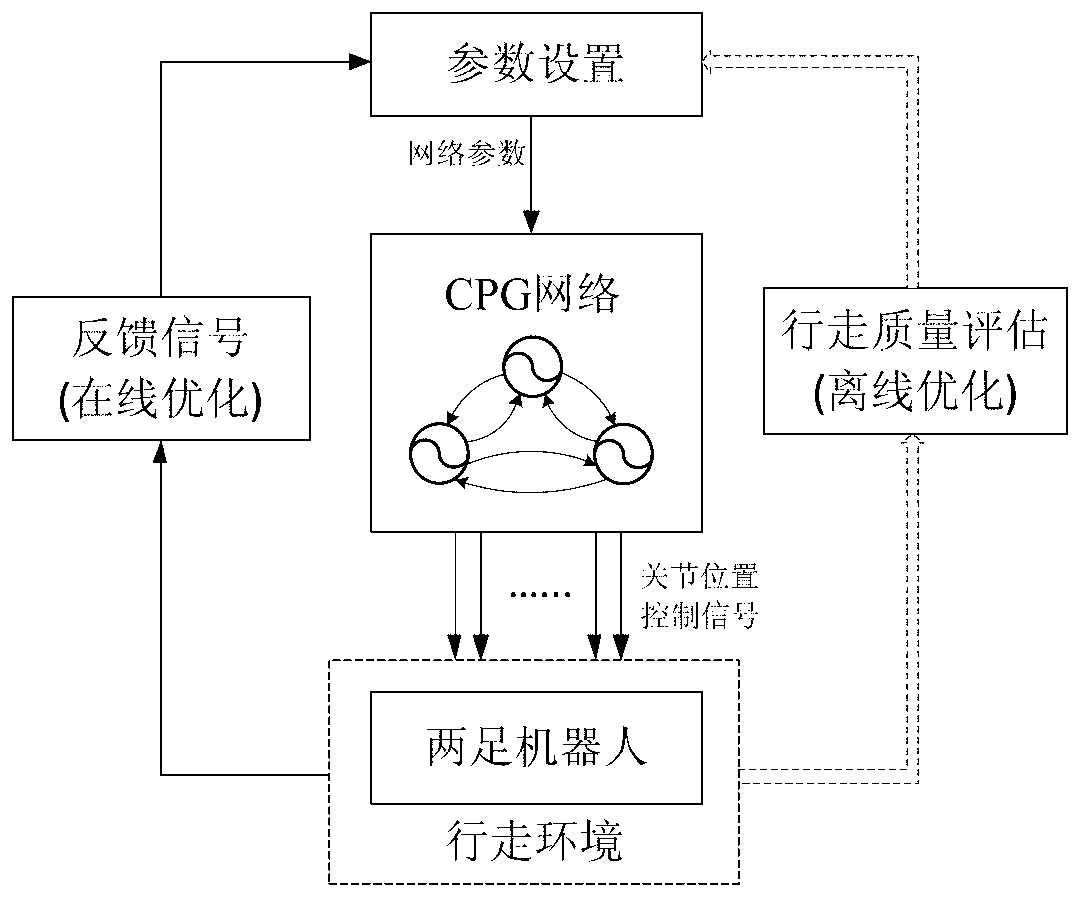
[0032] A method for constructing a biped robot CPG control network topology, comprising the following steps:
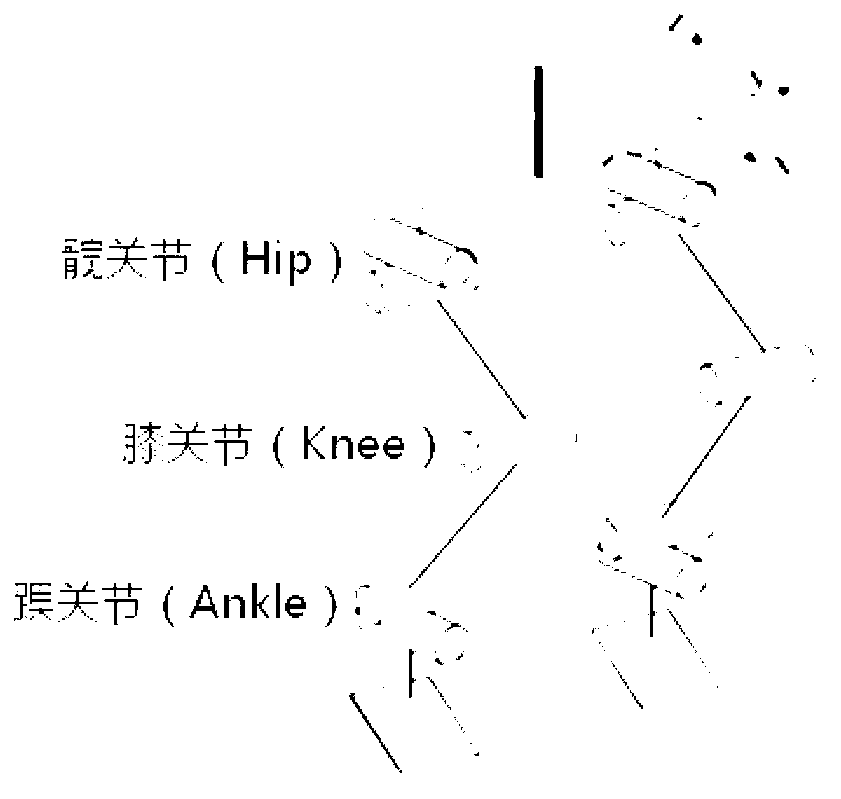
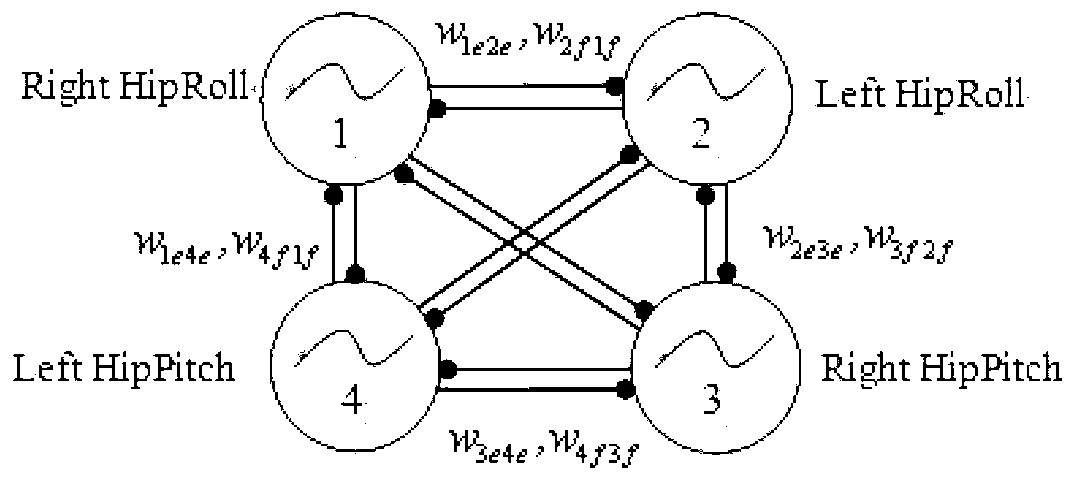
[0033] step 1: figure 2 Shown is a schematic diagram of the degree of freedom distribution of the legs of the most commonly researched and applied biped humanoid robot. For the walking control of this type of biped robot, the degree of freedom of the hip joint is most important for the phase control of the left and right legs. Therefore, in this design, the CPG control network is divided into the body control network (body network) part for controlling the hip joint and the leg control network (leg network) part for controlling the leg joints, so as to realize the control signal of the left and right legs of the biped robot. Symmetry and phase relationship of the left and right legs of the robot during walking. Take the body network part as an example, such as image 3 As shown, the bidirectional coupling connection of four neuron units constitutes a body control ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More