

Identification and space positioning device and method for fished targets based on omni directional vision
A stereo vision and spatial positioning technology, applied in character and pattern recognition, image data processing, instruments, etc., can solve problems such as matching errors, large matching differences of corresponding points, and affecting matching accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0068] Reference Figure 1 ~ Figure 15 , A device for identifying and spatial positioning of fishing objects based on panoramic stereo vision, including a binocular stereo panoramic vision sensor, a microprocessor for analyzing and processing the identification and spatial positioning of fishing objects. The vision sensor is connected to the microprocessor through a USB interface;
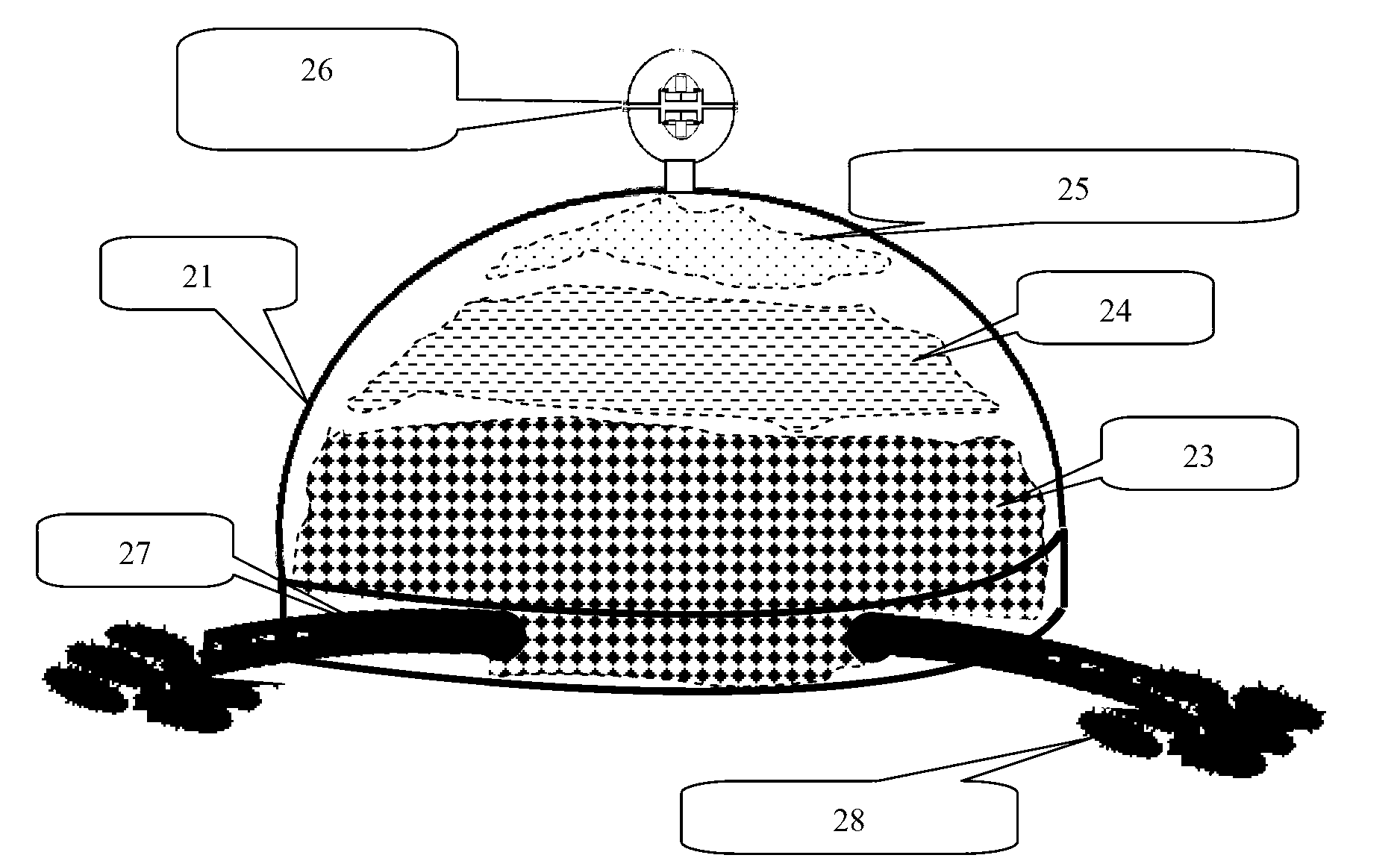
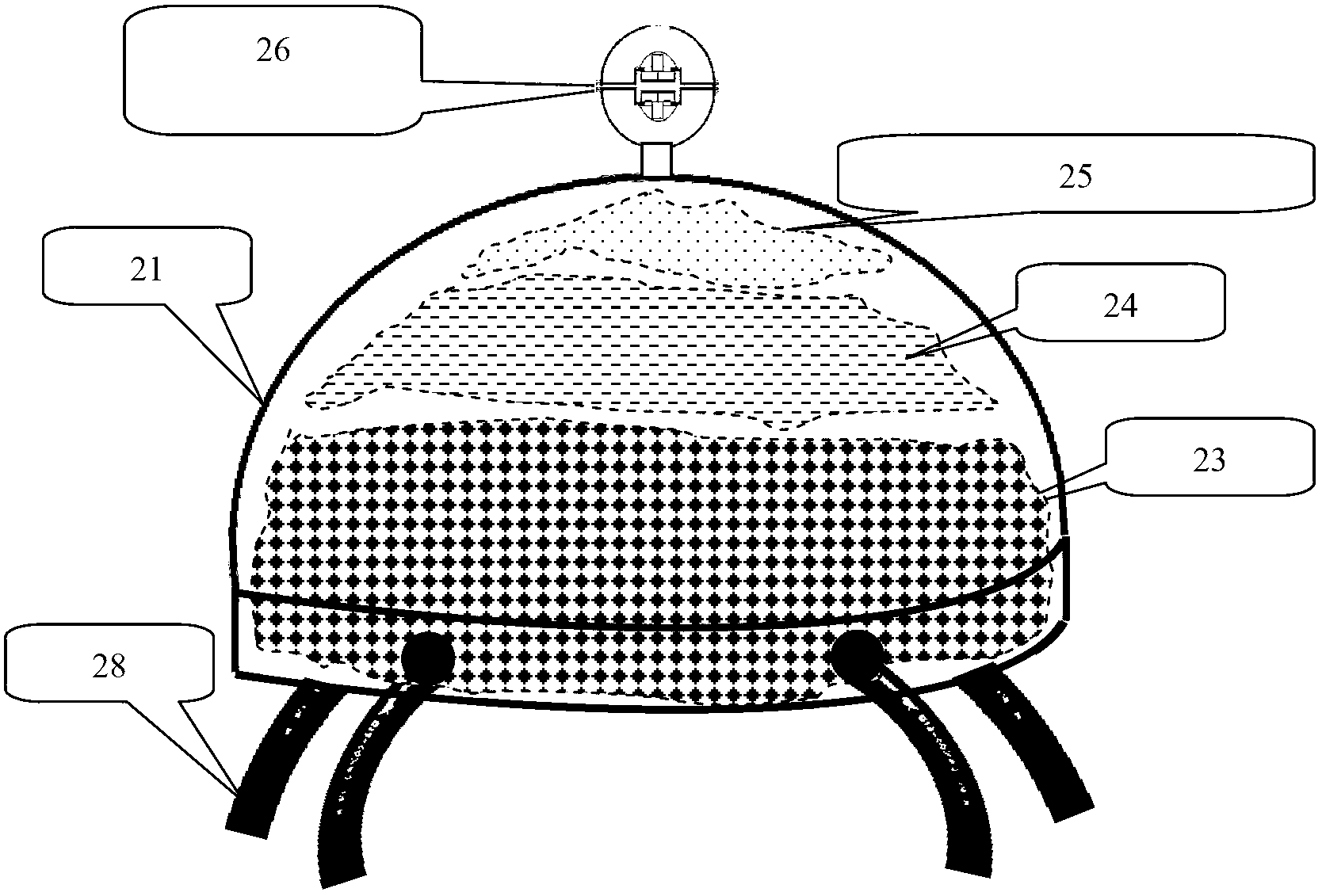
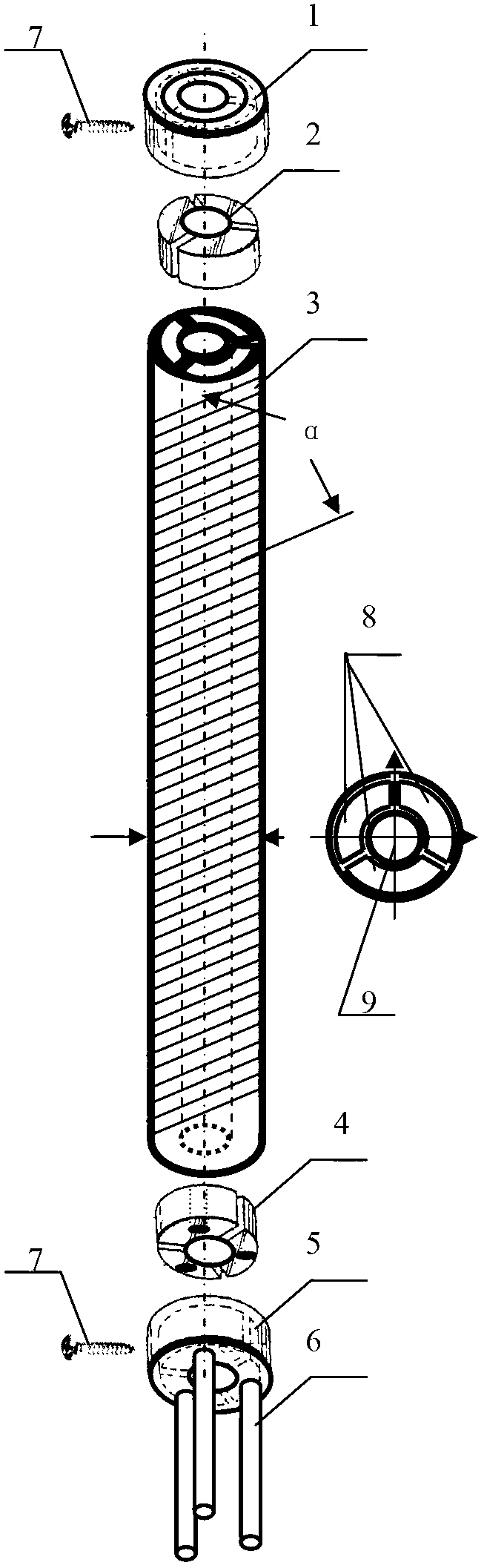
[0069] The fishing action is implemented by the bionic robotic arm. The bionic robotic arm has two functions, one is to complete the walking of the fishing robot, and the other is to complete the fishing action; there are four bionic robots in the present invention, respectively It is fixed on the front and rear sides of the collection compartment of the fishing robot body, very similar to the limbs of a sea turtle, made of artificial muscles, as attached image 3 As shown; the shape of the bionic robotic hand is a tube with three degrees of freedom muscles, and the tube is divided into three 120° fan-...
Embodiment 2
[0122] A processing flow for the identification and spatial positioning of fishing objects based on panoramic stereo vision is that before identifying the fishing objects, a feature library of various fishing objects needs to be established first, and the panoramic stereo ODVS needs to be completed. Preparatory work for internal and external parameter setting, calibration and polar line correction. The parameters of setting, calibration and polar line correction are all stored in the storage unit so that they can be recalled when the fishing robot is used; then, the fishing robot enters the fishing operation process on the seabed, To achieve fishing while walking, the process of identifying and spatial positioning of specific fishing objects is as follows;
[0123] Step 1): Read two panoramic video images of two ODVS with the same imaging parameters through the video image reading unit;
[0124] Step 2): Process the two panoramic video images according to the settings, calibration ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More