

Variational mechanism-based indoor scene three-dimensional reconstruction method
An indoor environment and 3D reconstruction technology, which is applied to the reconstruction of large-scale indoor scenes and the field of 3D reconstruction of indoor environment, to achieve the effect of reducing the amount of processed data, improving reconstruction accuracy, and reducing computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
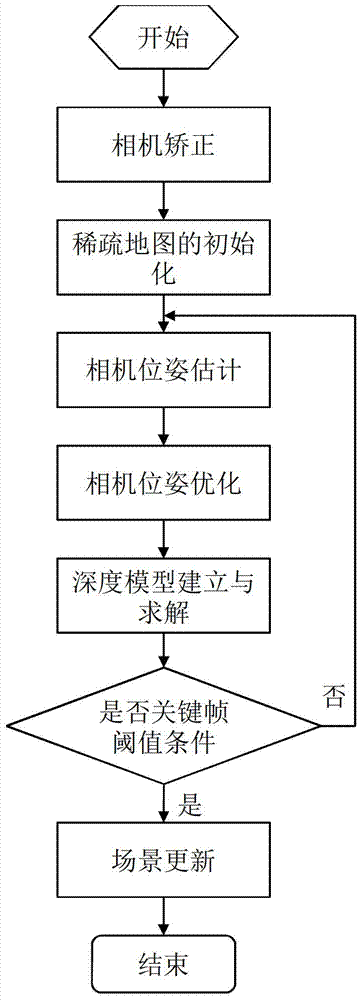
[0104] figure 1 It is a flow chart of an indoor 3D scene reconstruction method based on a variational model, including the following steps:
[0105] Step 1, obtain the calibration parameters of the camera, and establish a distortion correction model.
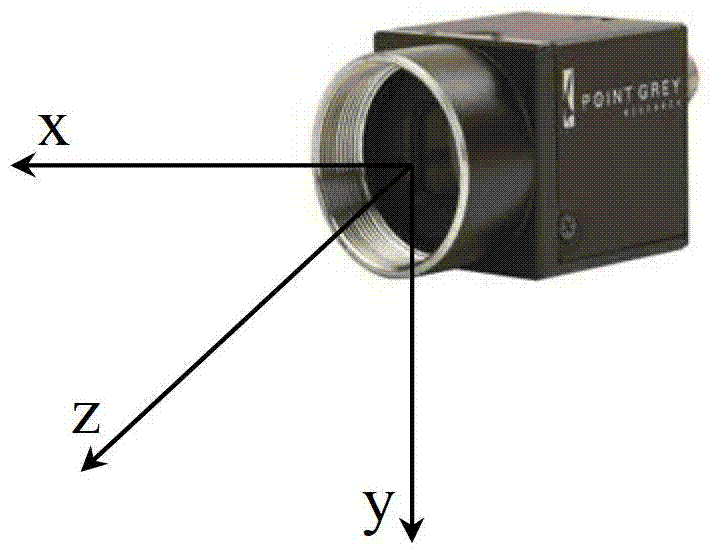
[0106] Step 2, establish camera pose description and camera projection model.
[0107] Step 3, use the SFM-based monocular SLAM algorithm to realize camera pose estimation.
[0108] Step 4: Establish a variational mechanism-based depth map estimation model and solve the model.
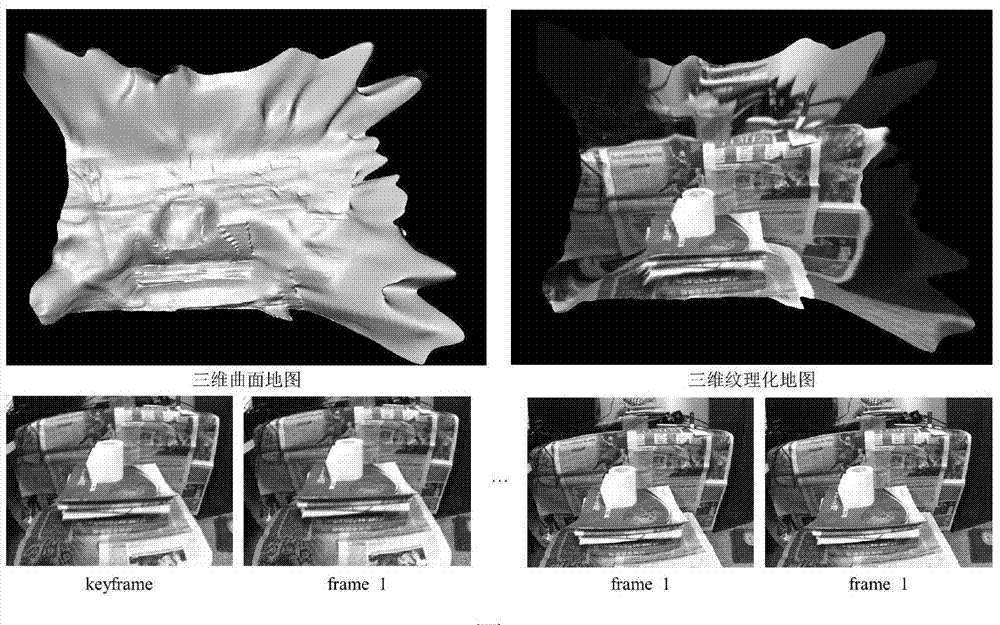
[0109] Step five, establishing a key frame selection mechanism to realize updating of the 3D scene.
[0110] An application example of the present invention is given below.
[0111]The RGB camera used in this example is Point Gray Flea2, the image resolution is 640×480, the maximum frame rate is 30fps, the horizontal field of view is 65°, and the focal length is about 3.5mm. The PC used is equipped with GTS450GPU and i5 quad-core CPU.
[0112] Dur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More