Silicon solar cell surface defect detection and identification method
A technology of silicon solar cells and solar cells, which is applied in character and pattern recognition, instruments, computer components, etc., can solve the problems of low level of recognition automation and low detection efficiency, and achieve high robustness and reliability, good Classification effect, effect of low false detection rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
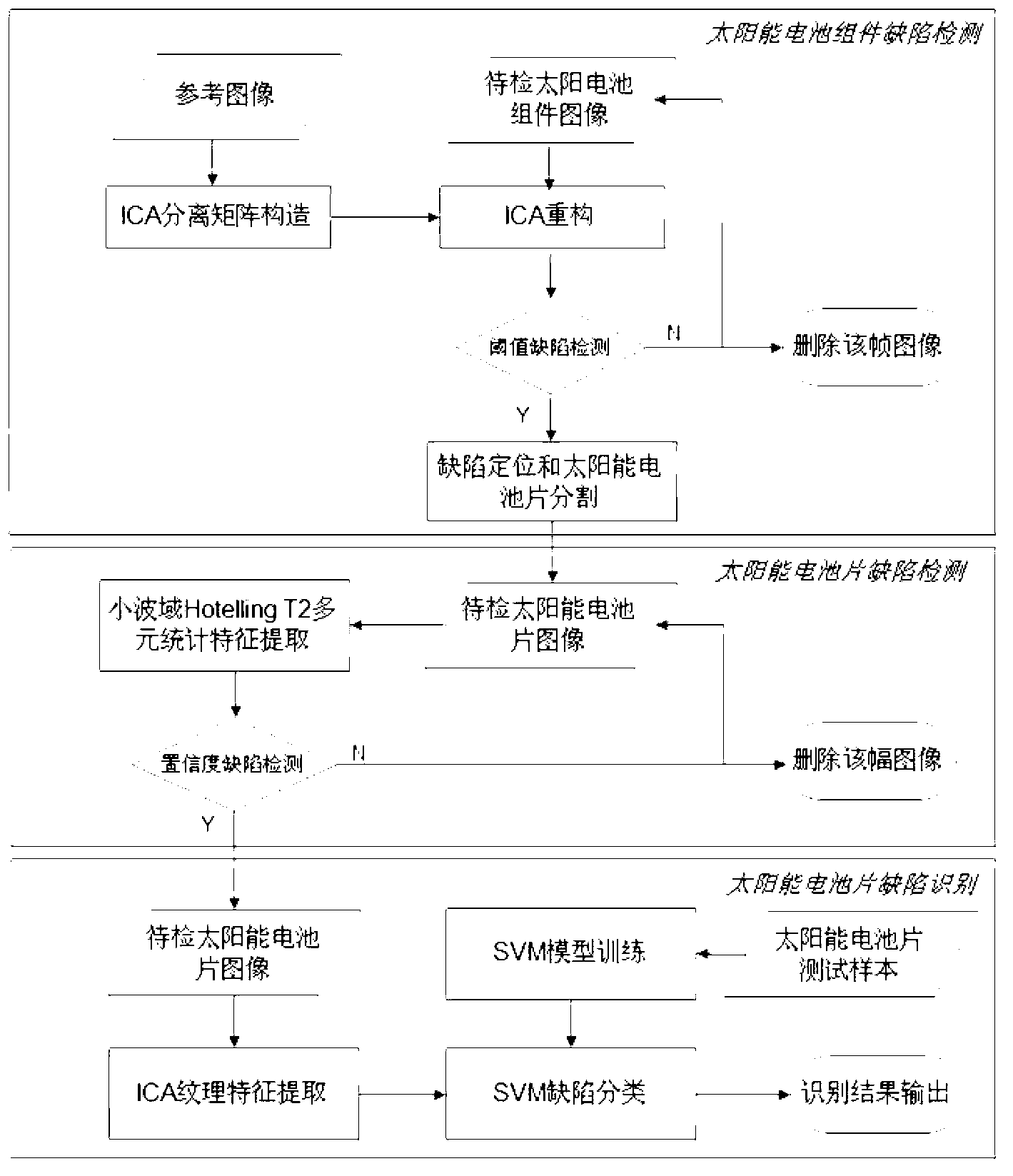
[0016] The present invention will be further described below in conjunction with the accompanying drawings.
[0017] Before the implementation of the invention, it is necessary to train the reconstruction matrix used for solar cell module image defect detection and the ICA basis function used for solar cell sheet defect classification.
[0018] 1. It is used for reconstruction and defect detection of solar cell module images, and its specific steps include:
[0019] (1), reference image preprocessing
[0020] Select a non-defective solar cell module image to perform de-meaning and whitening preprocessing, and linearly transform the image after de-meaning, so that the original sample data is projected into a new subspace and becomes a whitening vector. The change formula is: Z=VX, where X is the original image, Z is the preprocessed image, and the linear transformation matrix C=E(X X T ) is the covariance matrix of the input vectors after mean removal. After whitening, the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



