

Method for acquiring 3D (three-dimensional) point cloud by onboard 2D (two-dimensional) laser range finder
A technology of laser range finder and point cloud, which is applied in directions such as navigation through speed/acceleration measurement, which can solve the problem that the sensor is difficult to obtain 3D environmental information, and achieve the effect of reducing load burden, avoiding resource consumption, and using effectively
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0026] Embodiments of the present invention are described in detail below, and examples of the embodiments are shown in the drawings, wherein the same or similar reference numerals denote the same or similar elements or elements having the same or similar functions throughout. The embodiments described below by referring to the figures are exemplary only for explaining the present invention and should not be construed as limiting the present invention.
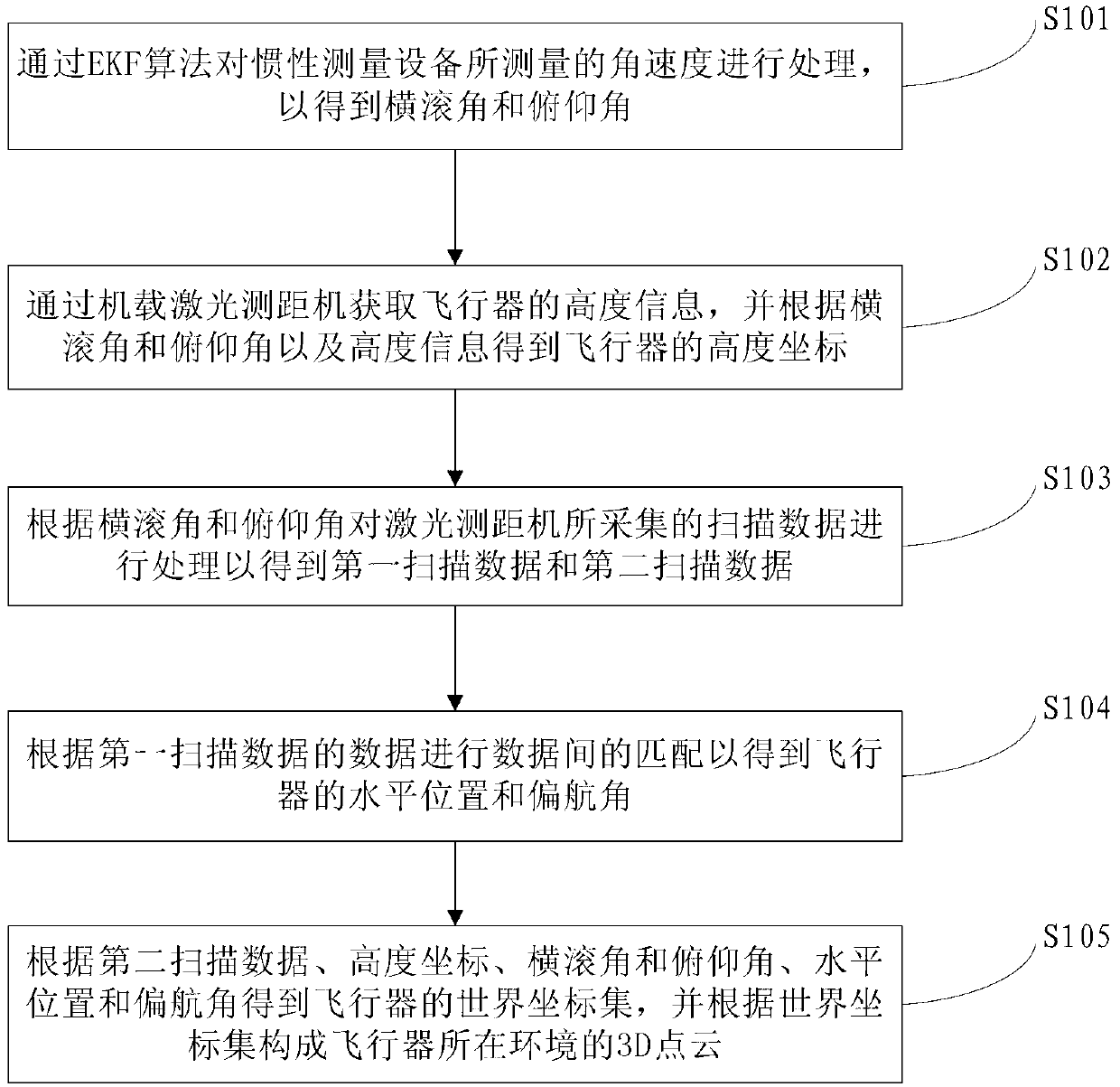
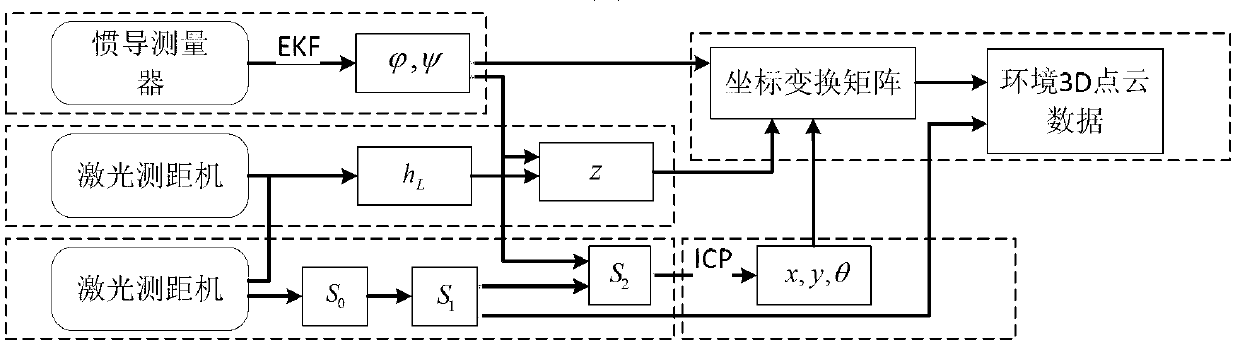
[0027] figure 1 It is a flowchart of a method for acquiring a 3D point cloud by an airborne 2D laser range finder according to an embodiment of the present invention. figure 2 It is a schematic diagram of data processing for a method for acquiring a 3D point cloud by an airborne 2D laser range finder according to an embodiment of the present invention. Such as figure 1 As shown, the method for obtaining a 3D point cloud by an airborne 2D laser rangefinder according to an embodiment of the present invention includes the foll...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More