

Medical six-degree-of-freedom automatic adjusting manipulator grinding and clamping device for surgical operation
An automatic adjustment and clamping device technology, applied in the field of medical equipment, can solve the problems of reducing operation efficiency, increasing operation difficulty, and patient injury, achieving high control accuracy and avoiding mechanical damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
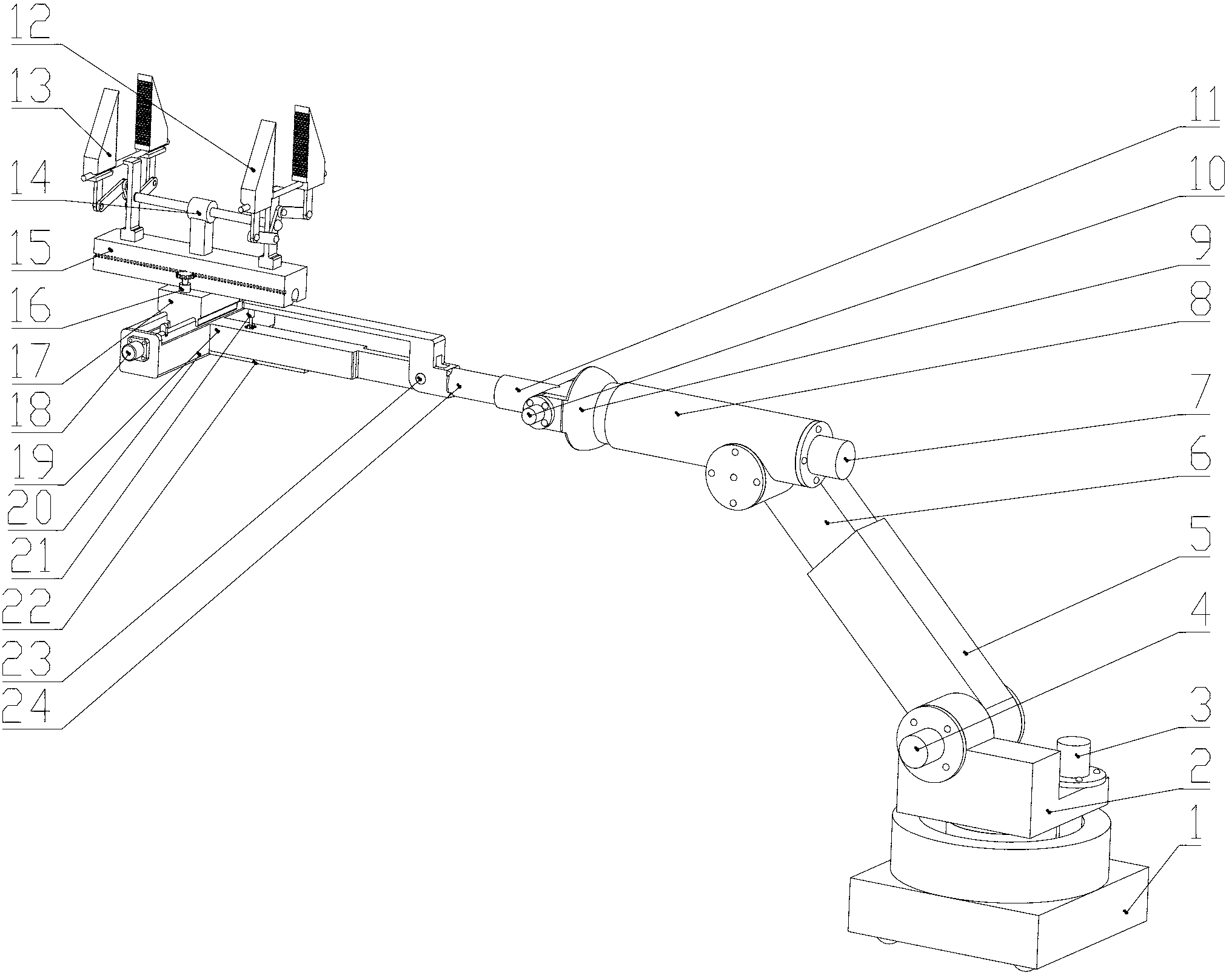
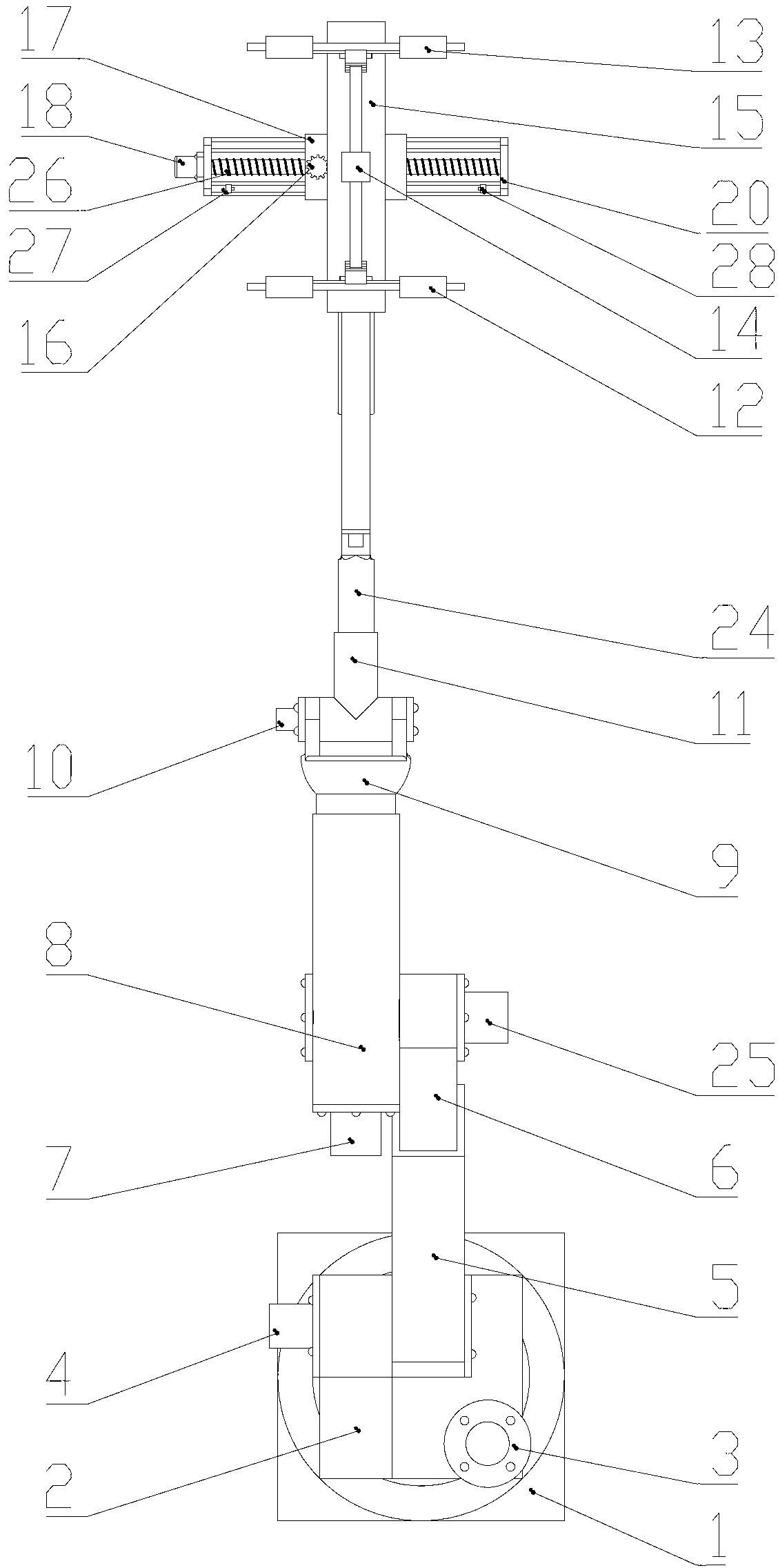
[0037] figure 1 It shows the various components of the six-degree-of-freedom automatic adjustment robotic arm grinding and clamping device for medical surgery, combined with figure 1 , figure 2 , the transmission and positioning of its various parts are as follows: the base 1 is a solid metal material, which plays a role in maintaining the center of gravity of the device in the whole device, so that the device is not easy to fall due to force or other parts being too heavy. There is a hole in the center of the upper part of the base 1. Insert the shaft at the lower end of the turntable 2 into the center hole of the base 1. There is an annular groove outside the center hole. The large-diameter inner surface of the annular groove is designed as an internal gear. The main shaft of the motor I3 Designed as a gear shaft, the motor I3 passes through the ho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More