

Wrist joint structure of underwater mechanical arm
A technology of underwater manipulator and wrist joint, which is applied in the field of wrist joint structure, can solve the problems of large size and influence on the movement of underwater manipulator, and achieve the effects of light weight, simple structure, and low manufacturing and production costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further explained below in conjunction with the drawings.
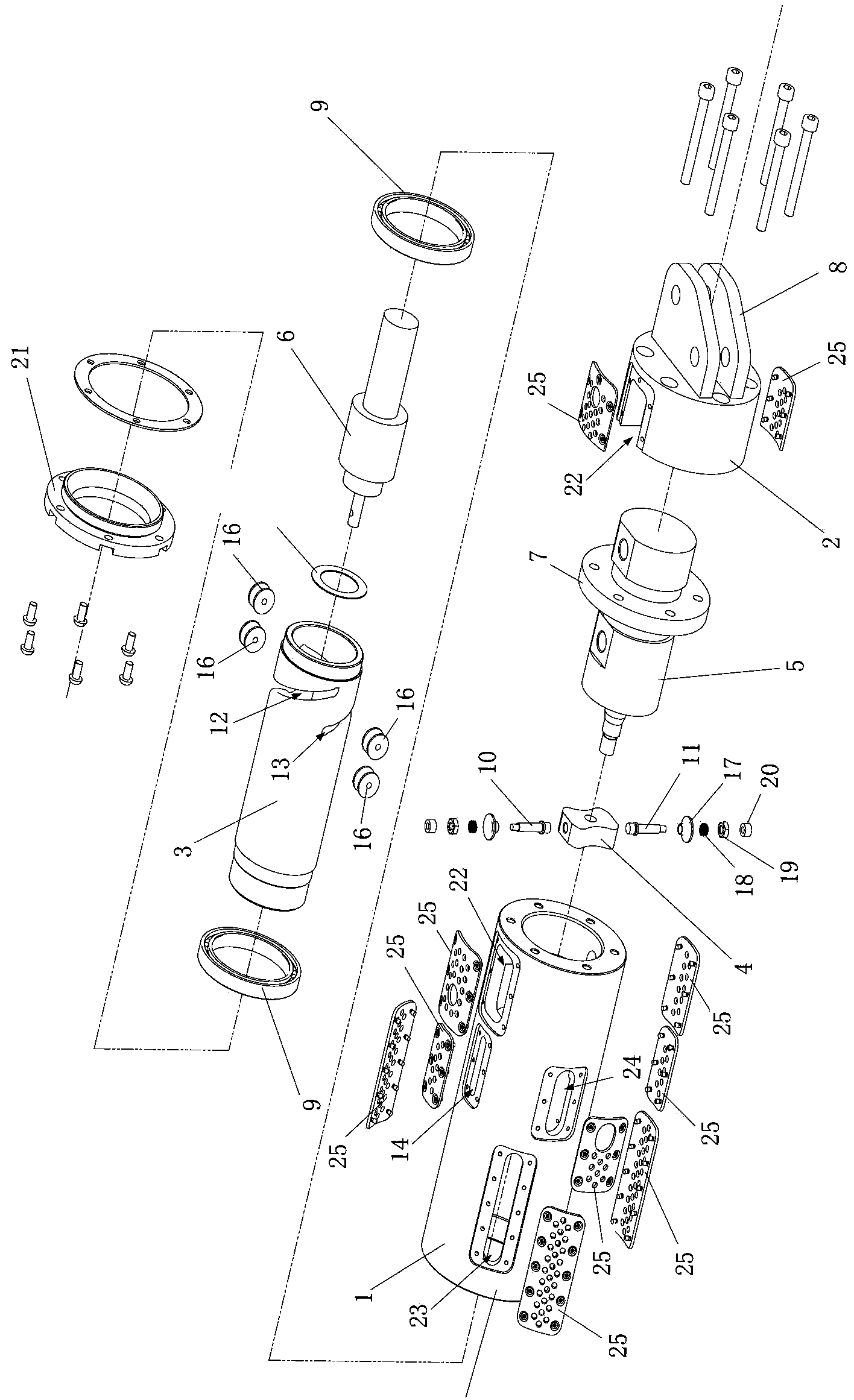
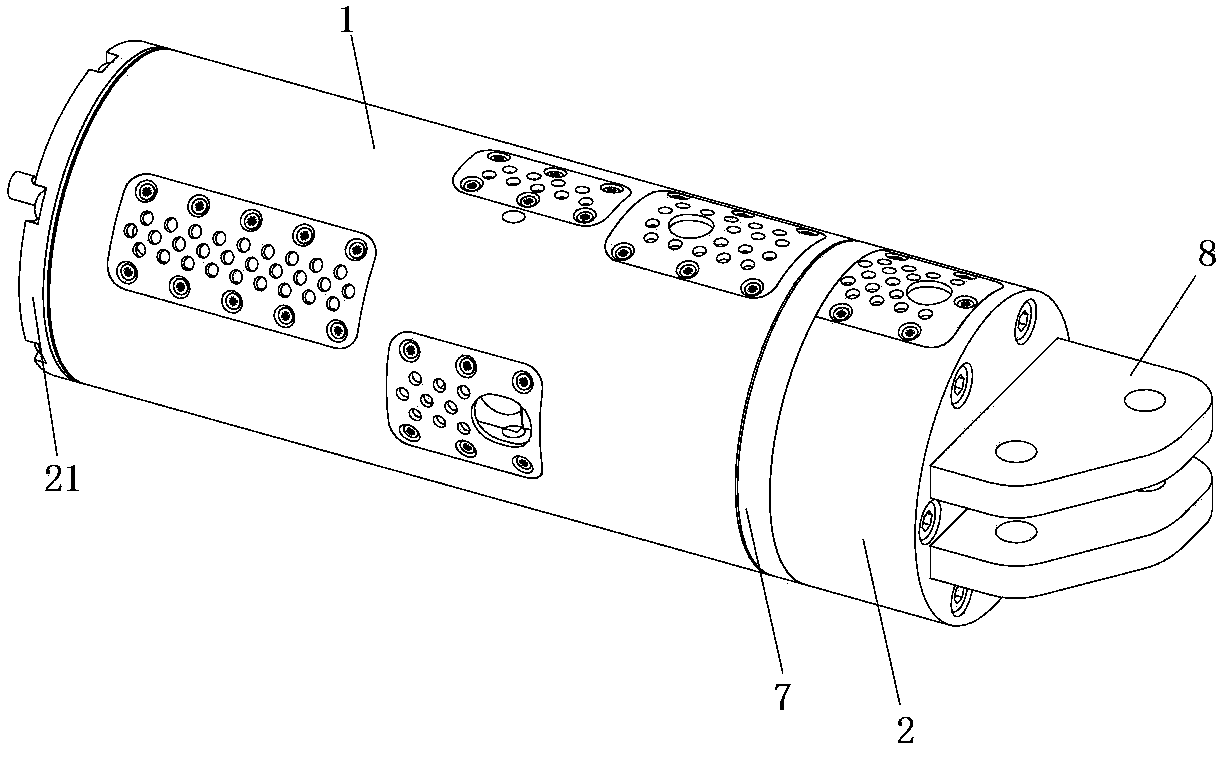
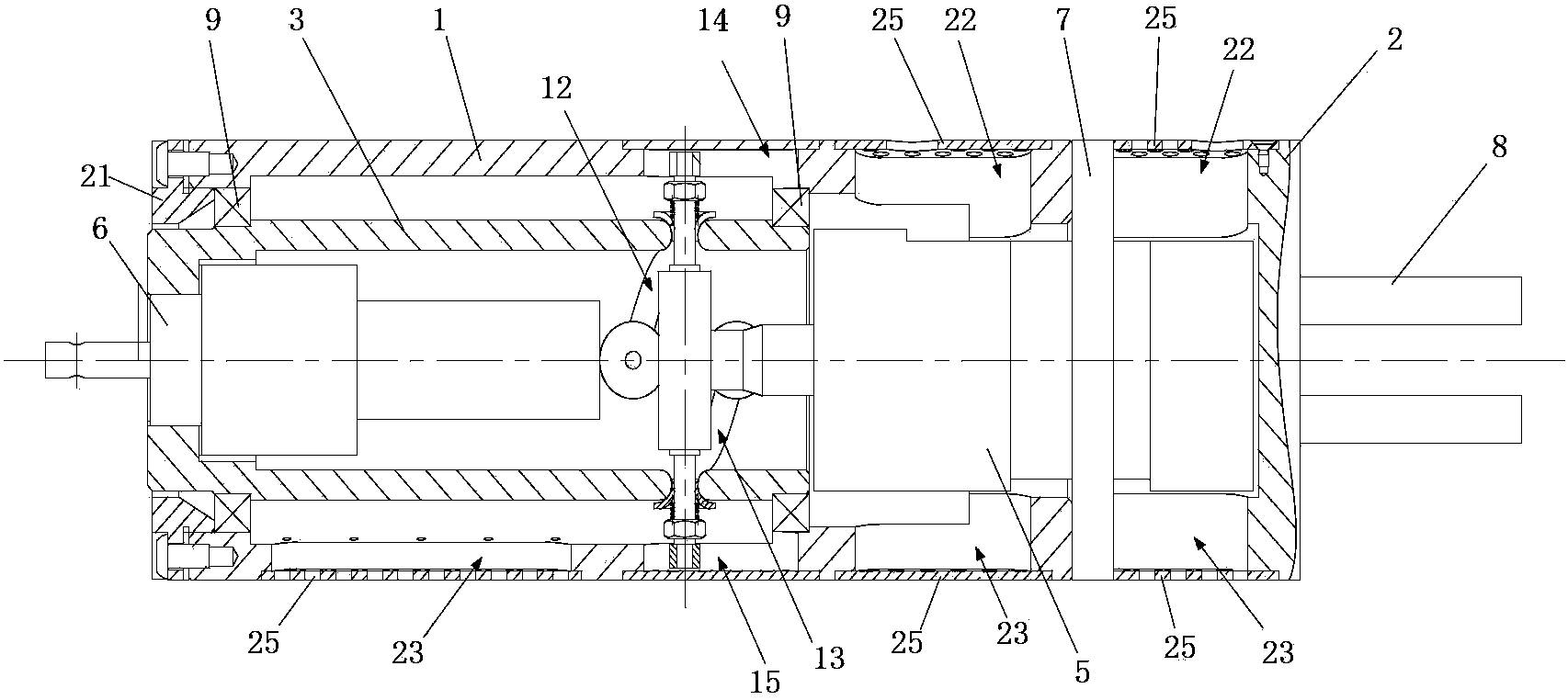
[0034] The wrist joint structure of the present invention includes an outer cylinder 1, a tail cover 2, a cam cylinder 3, a pin plate 4, a first hydraulic cylinder 5 and a second hydraulic cylinder 6, such as figure 1 , figure 2 , image 3 Shown.
[0035] Wherein, the rear end of the outer cylinder 1 is fixedly connected to the tail cover 2 through the flange 7 provided in the axial direction of the first hydraulic cylinder 5, thereby forming an integral cylindrical wrist joint shell; thereby fixing the first hydraulic cylinder 5 to the wrist joint Inside the housing, and the piston rod of the first hydraulic cylinder 5 faces the front end of the cam barrel 3. A hinge frame 8 is designed on the end surface of the tail cover 2 to realize the connection between the wrist joint structure of the present invention and the joint of the underwater robot arm. A cam cylinder 3 is coaxially arr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More