

Modular hydraulic-drive four-leg robot with variable leg shape structures
A quadruped robot, modular technology, applied in motor vehicles, transportation and packaging, etc., can solve the problems of increasing control difficulty, dynamic attitude adjustment difficulty, changing assembly direction, weak joints, etc. Good dynamic balance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings.
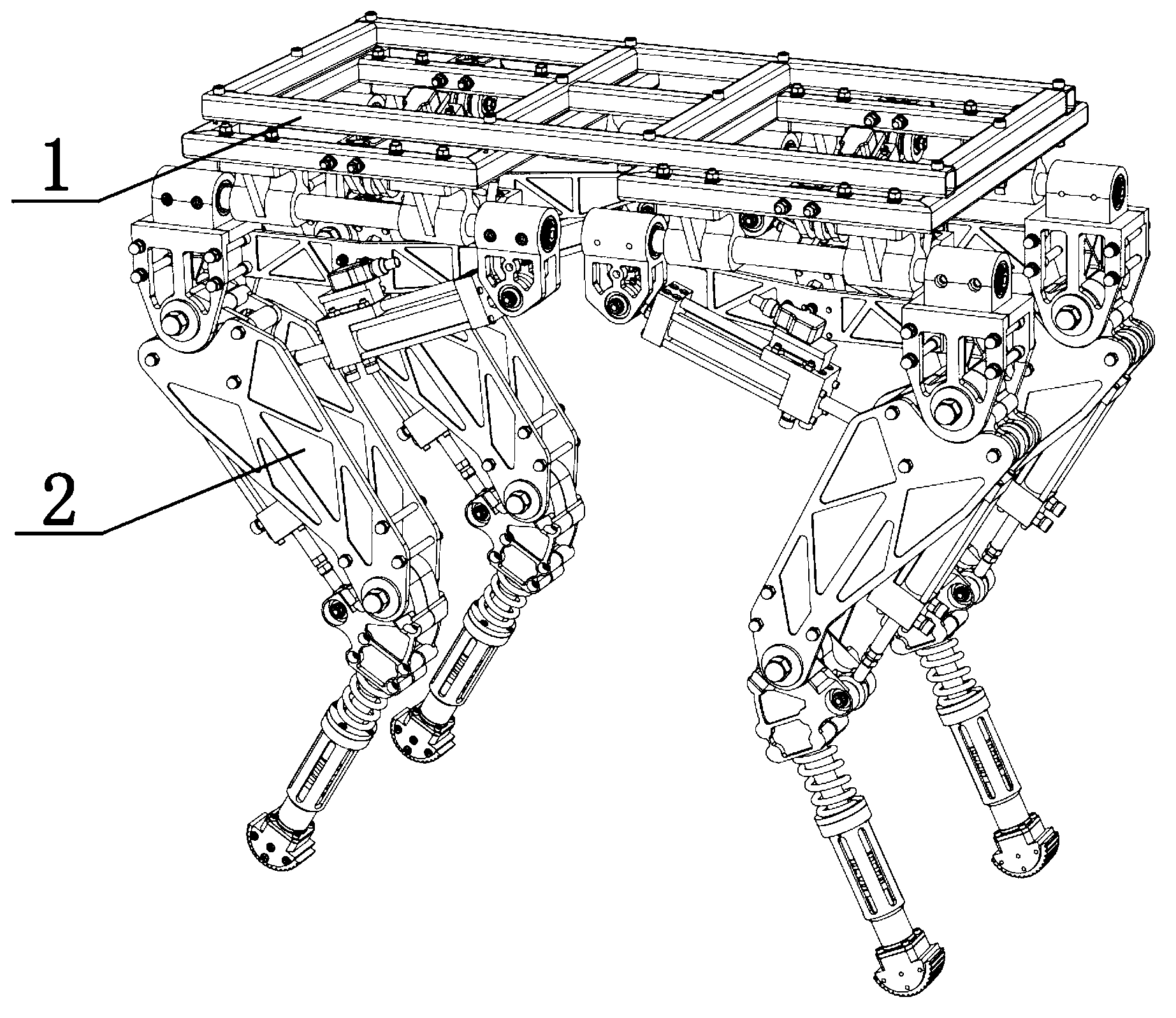
[0029] Such as figure 1 As shown, the robot includes a body frame 1 and two double-leg modules 2, and the two double-leg modules 2 are installed in the front knee and rear elbow with fasteners such as bolts to form an inwardly curved robot.
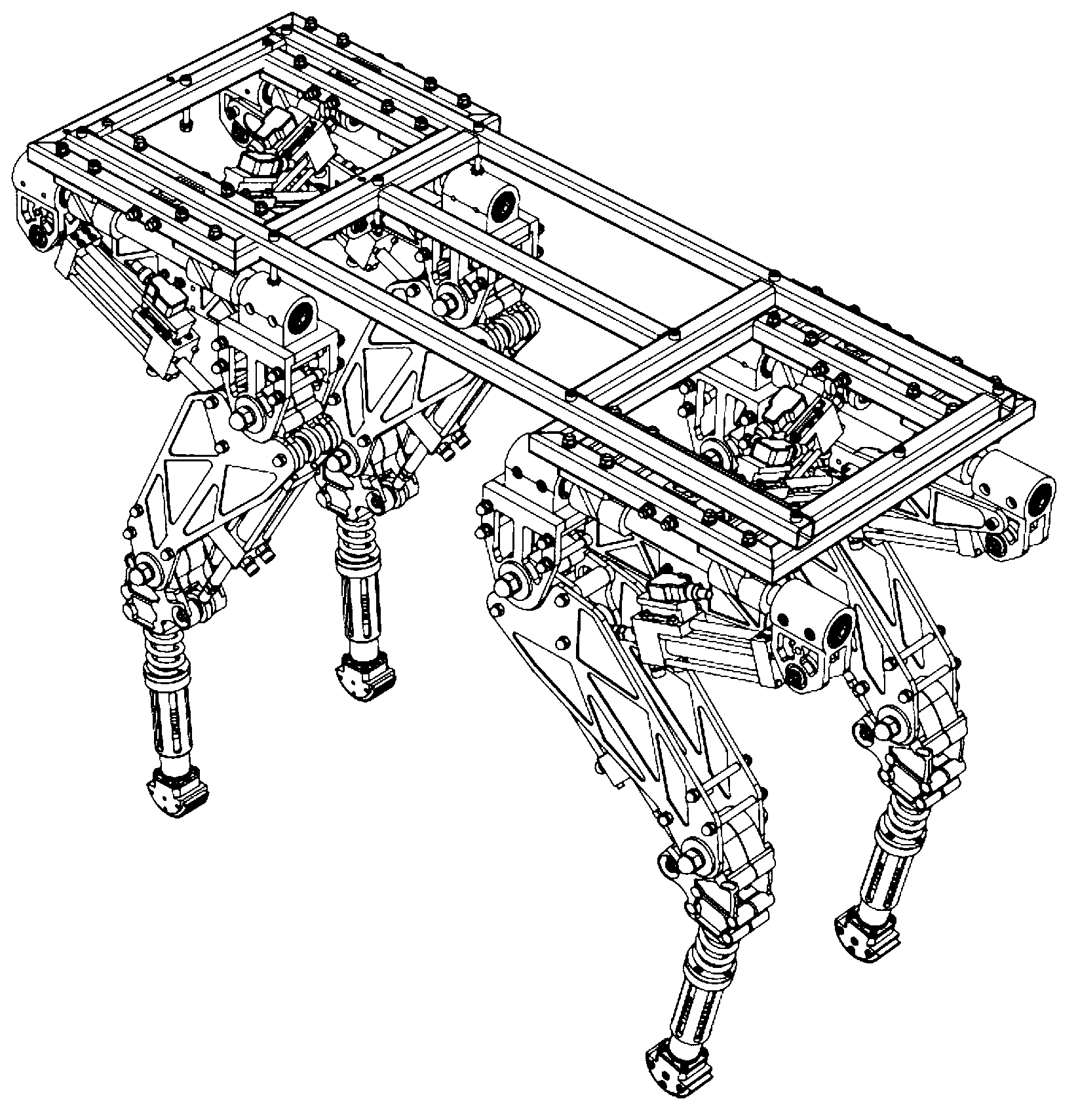
[0030] Such as figure 2 As shown, two double-leg modules 2 are installed according to the front elbow and the back knee formula to be an outward bending robot.
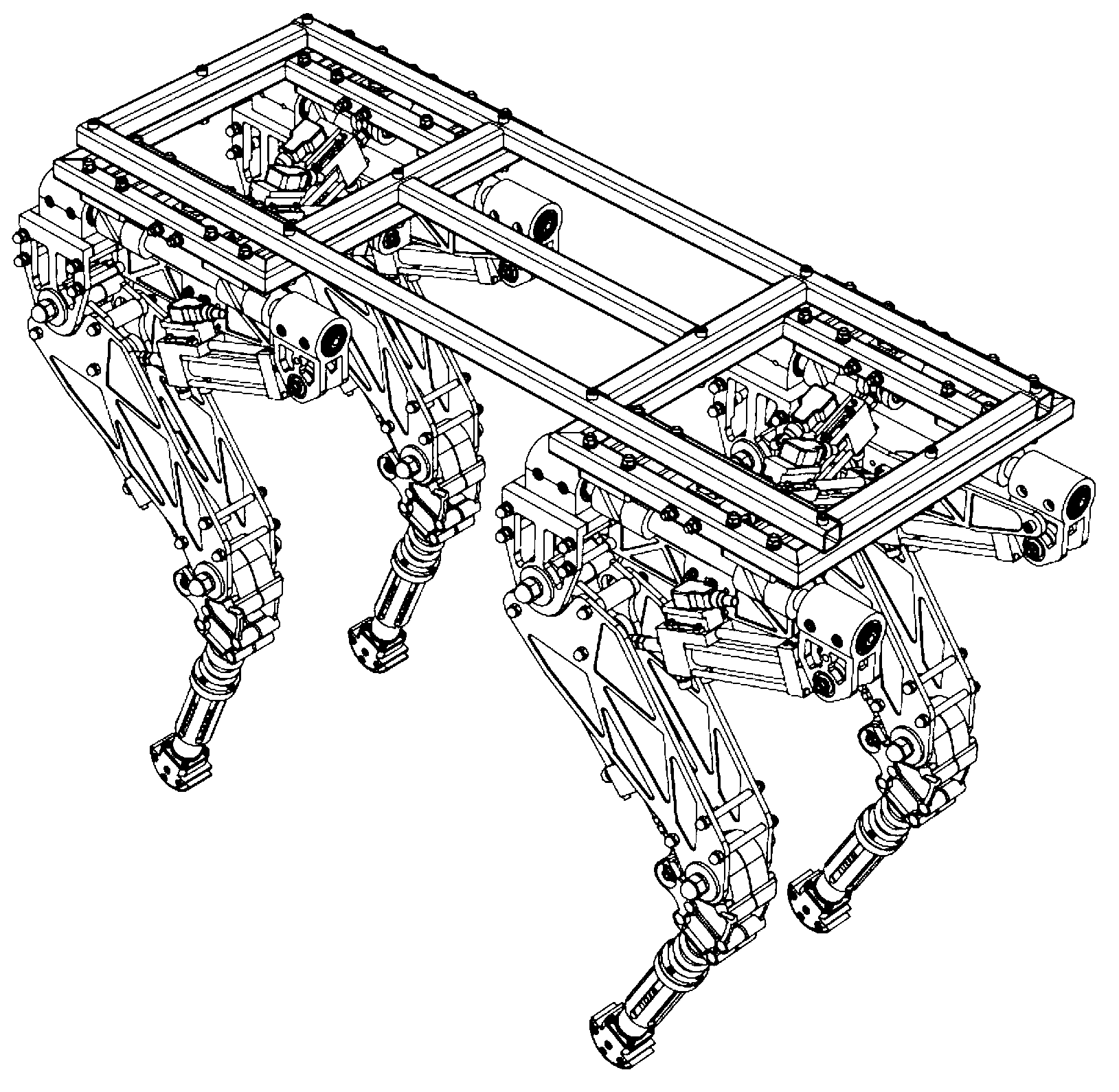
[0031] Such as image 3 As shown, the two double-leg modules 2 are installed in a full-elbow or full-knee type to form a full-elbow or full-knee robot. The connection method is simple and reliable, and it can be quickly disassembled to realize the conversion of different leg configurations.
[0032] Such as Figure 4 As shown, the double-leg module 2 includes a double-leg connection frame 3 and two single-leg modules 4 .
[0033] Such as Figure 5As shown, the sing...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More