

Quadruped robot remote control system and remote control method thereof
A technology of quadruped robot and remote control system, which is applied in the field of quadruped robot remote control system and its remote control, which can solve the problems of non-independent movement, inability to move freely, and inability to pose independently in any posture.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0065] The present invention will be further described below in conjunction with the accompanying drawings and embodiments. It should be noted that the following description is only for explaining the present invention and not limiting its content.
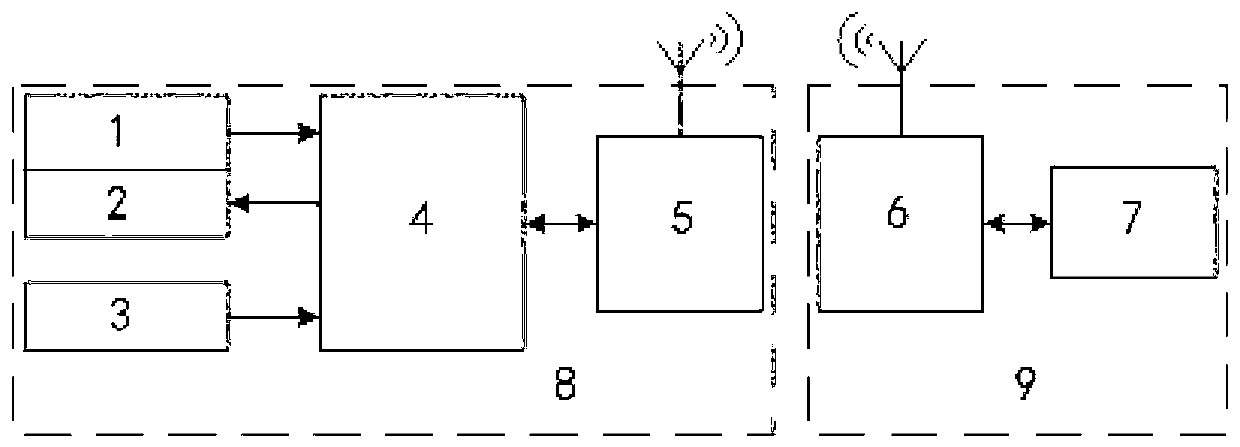
[0066] Such as Figure 3-4 As shown, the present invention adopts a multi-controller, that is, the digital part is separated from the analog part, and the analog signal of the joystick is converted into a digital signal by the slave controller, and then sent to the master controller. The main controller has many tasks, and needs to drive the liquid crystal display 2 for display, and drive the touch screen 1 to obtain touch information. In order for the operator to experience the sensitivity of the joystick 3, the acquisition period of the signal of the joystick 3 by the controller I4 should be relatively high, for example, the refresh frequency is 10-20Hz. The controller I4 displays some radio buttons through the LCD screen 2 for...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More