

A dual-degree-of-freedom platform drive controller for an embedded ultrasonic motor
A technology for driving controllers and ultrasonic motors, which is applied in the directions of generators/motors, piezoelectric effect/electrostrictive or magnetostrictive motors, electrical components, etc. The platform drive control system is bulky and the efficiency of the control algorithm is low. It achieves the effect of continuous real-time frequency signal adjustment, low cost, and high-performance speed control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings.
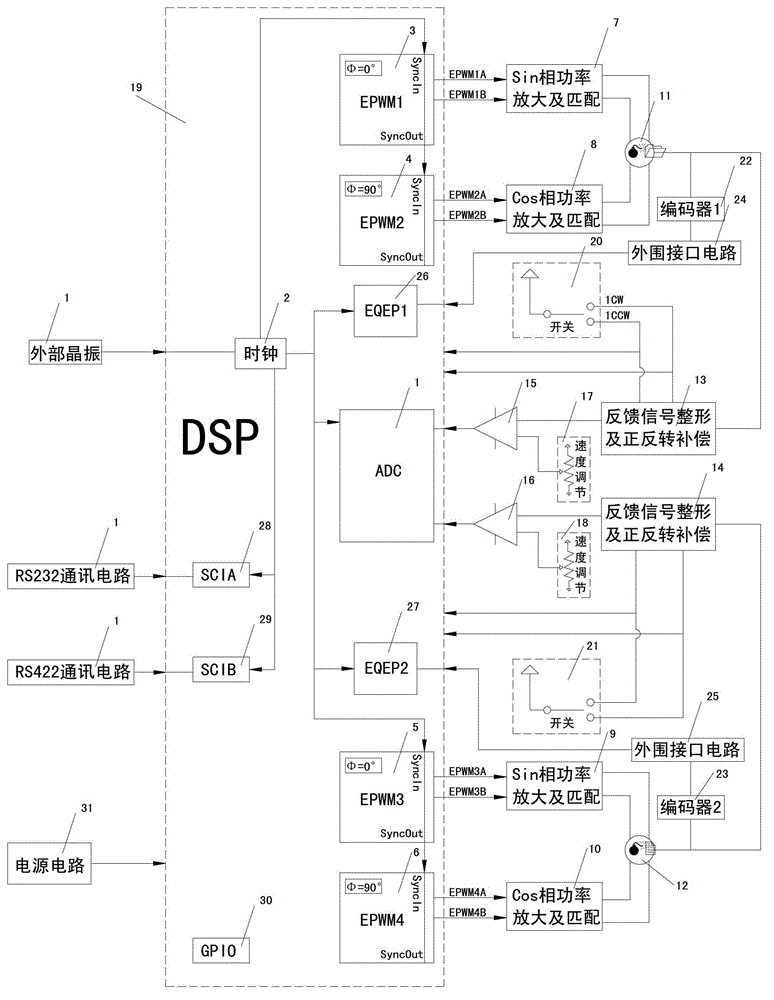
[0029] Such as figure 1 As shown, the embedded ultrasonic motor dual-degree-of-freedom platform drive controller of this embodiment includes an external crystal oscillator input unit 1, an embedded microprocessor 19, and a power amplification and matching unit. The clock signal sent by the external crystal oscillator input unit 1 passes through The EPWM clock unit 2 in the embedded microprocessor 19 is distributed to the first EPWM module 3, the second EPWM module 4, the third EPWM module 5 and the fourth EPWM module 6;
[0030] The output signal of the first EPWM module 3 is processed by the first power amplification and matching module 7 in the power amplification and matching unit to generate a first driving signal to the first ultrasonic motor 11 to be controlled;
[0031] The output signal of the second EPWM module 4 is processed by the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More