

POS system double-strapdown calculating post-processing method based on R-T-S smoothness
A technology of R-T-S and POS systems, applied in radio wave measurement systems, satellite radio beacon positioning systems, measurement devices, etc., can solve the problem of low error parameter estimation accuracy, achieve the effect of reducing errors and improving POS accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
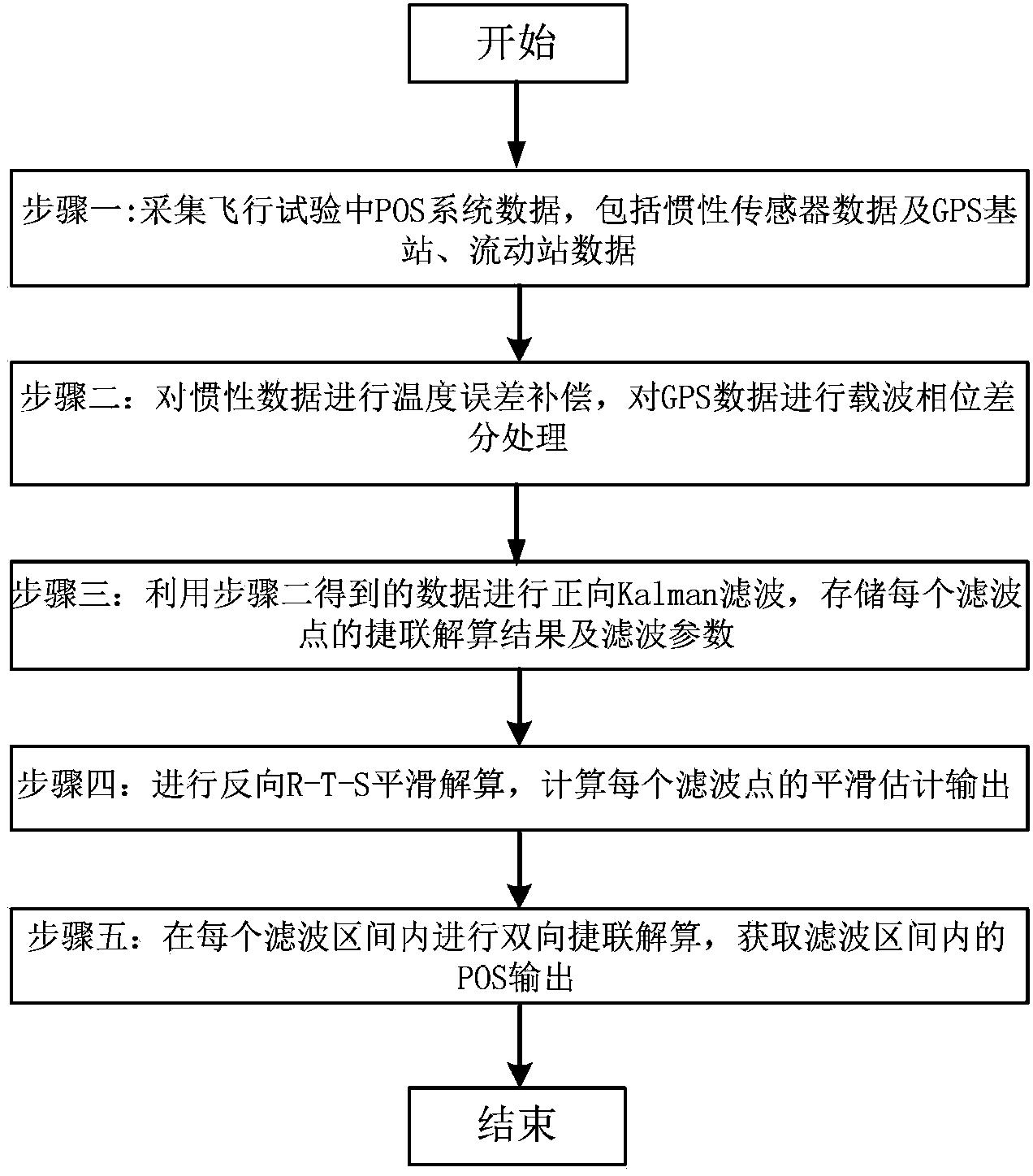
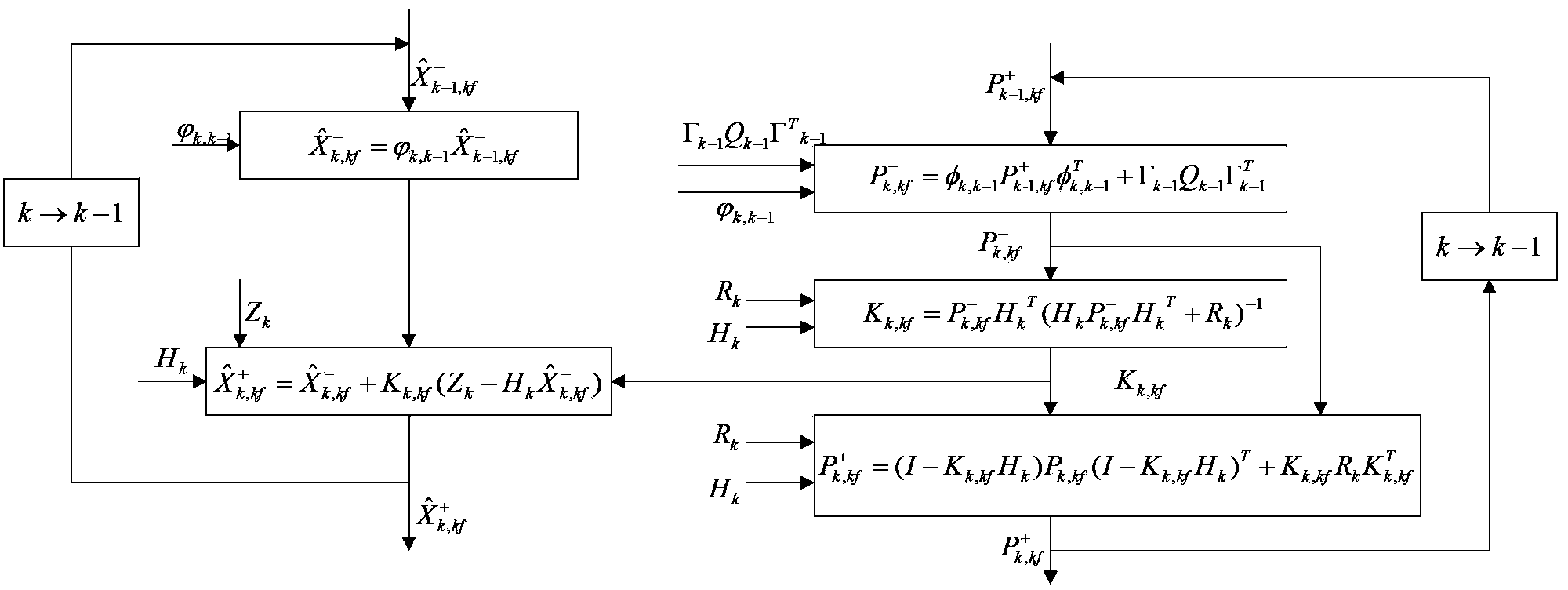
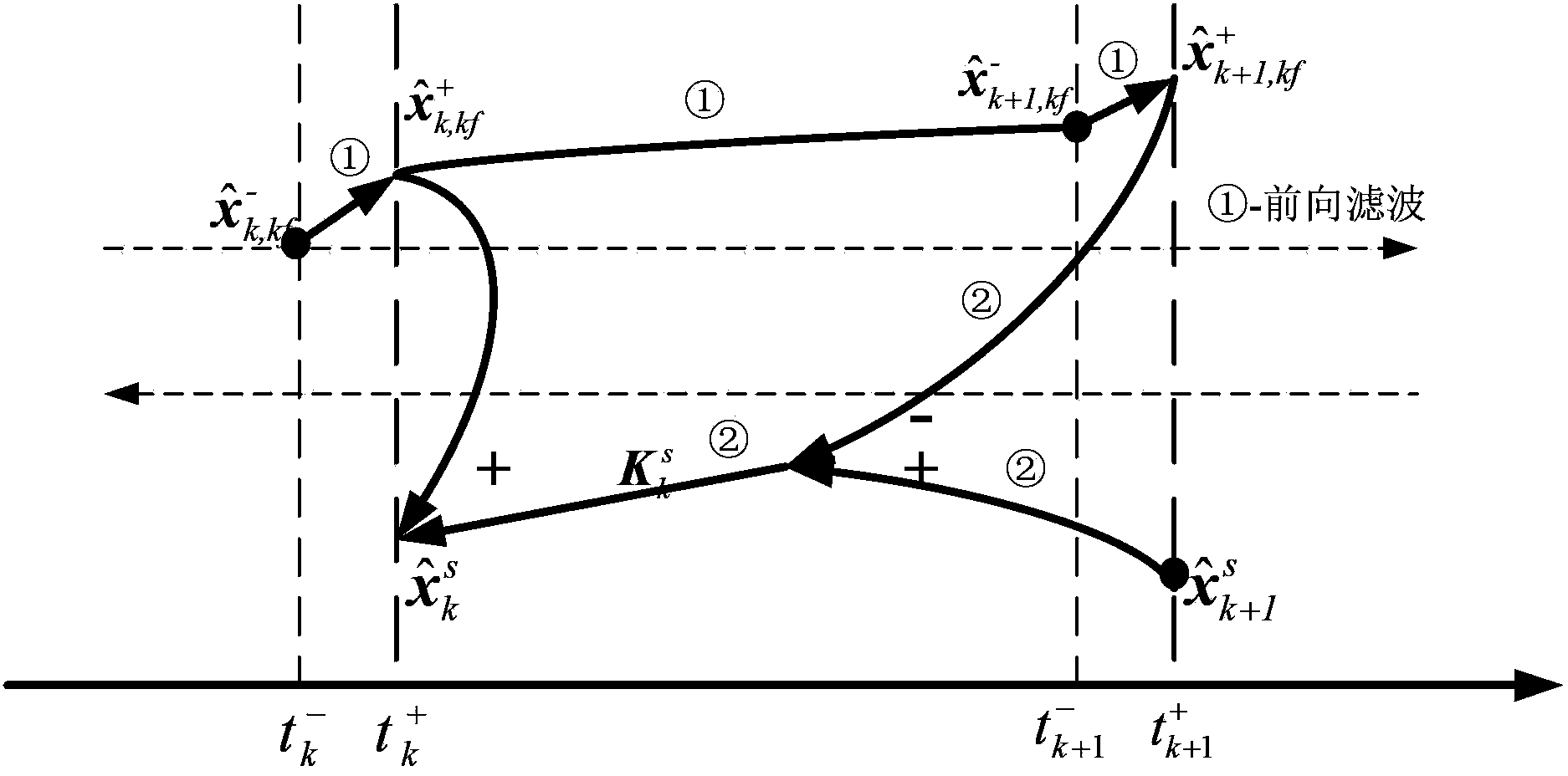
[0017] A post-processing method based on R-T-S smoothing POS system double strapdown solution is mainly divided into three parts: the first part is to perform Kalman filter solution to obtain the strapdown solution results and Kalman filter required for smoothing at each GPS sampling point parameter. The second part is to use the R-T-S smoothing method to estimate the smooth output of the state error at each GPS sampling point. The third part is based on the smooth results output by GPS sampling points, using two-way strapdown solution to realize the POS output in the adjacent filter interval.
[0018] Concrete implementation steps of the present invention are as follows:
[0019] (1) Collect the inertial measurement data, GPS base station data and GPS rover data output by the POS system during the flight test or vehicle test;
[0020] (2) Perform temperature error compensation on the inertial measurement data obtained in step (1), and the compensated inertial data includes ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More