

Method for workpiece platform micro moving part mechanical parameter estimation
A technology of mechanical parameters and workpiece table, applied in calculation, electrical digital data processing, aerodynamic improvement, etc., can solve the problem of difficult position of the center of mass of the micro-moving part of the workpiece table
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
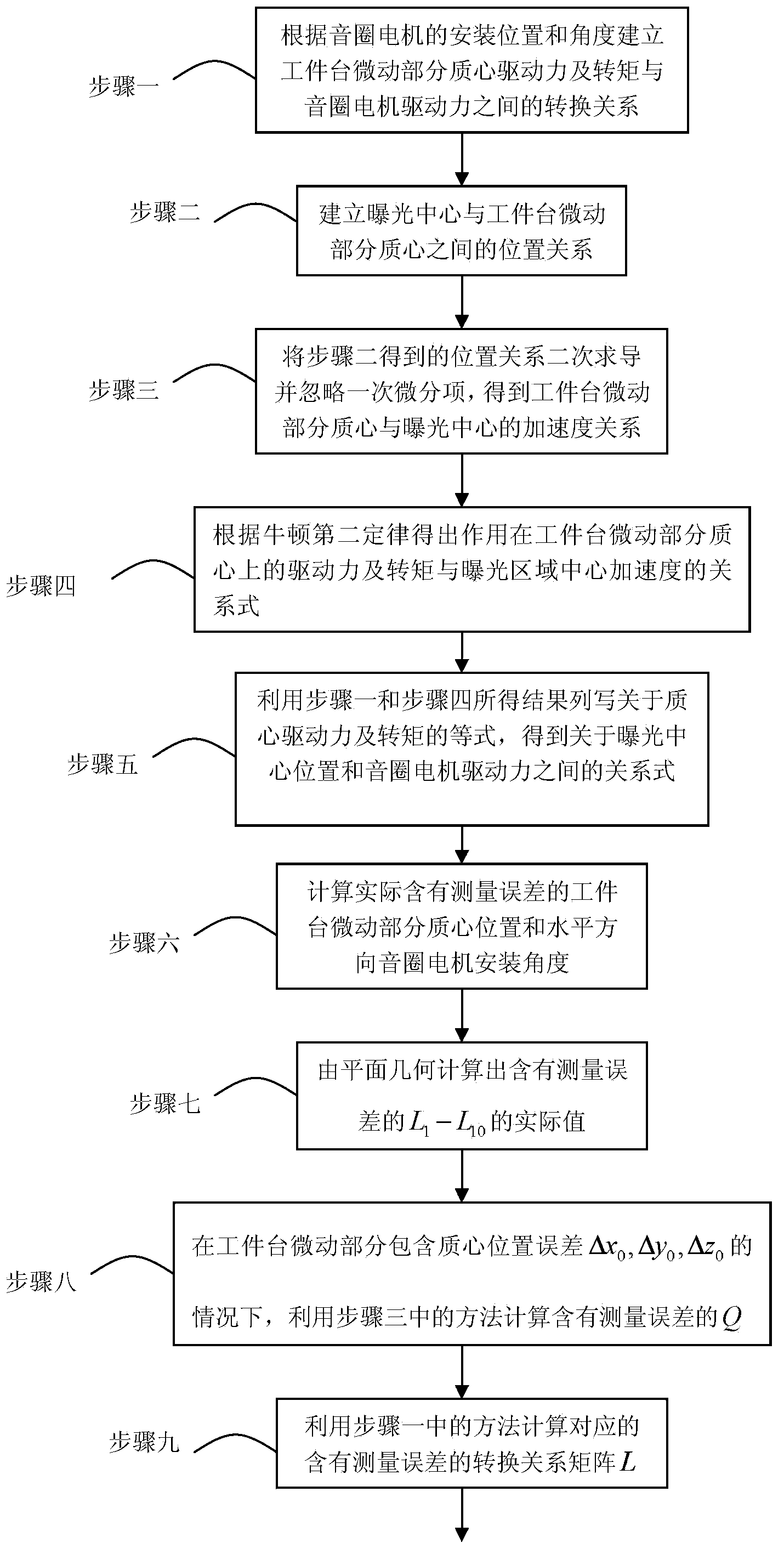
[0037] Embodiment 1: A method for estimating the mechanical parameters of the micro-movement part of the workpiece table in this embodiment is implemented in the following steps:
[0038] 1. According to the installation position and angle of the voice coil motor, establish the conversion relationship between the center-of-mass driving force and torque of the micro-movement part of the workpiece table and the driving force of the voice coil motor;
[0039] 2. Establish the positional relationship between the exposure center and the center of mass of the micro-movement part of the workpiece table;
[0040] 3. Secondary derivation of the positional relationship obtained in step 2 and ignoring the primary differential item to obtain the acceleration relationship between the center of mass of the micro-moving part of the workpiece table and the exposure center;
[0041] 4. According to Newton's second law, the relationship between the driving force and torque acting on the center ...
specific Embodiment approach 2
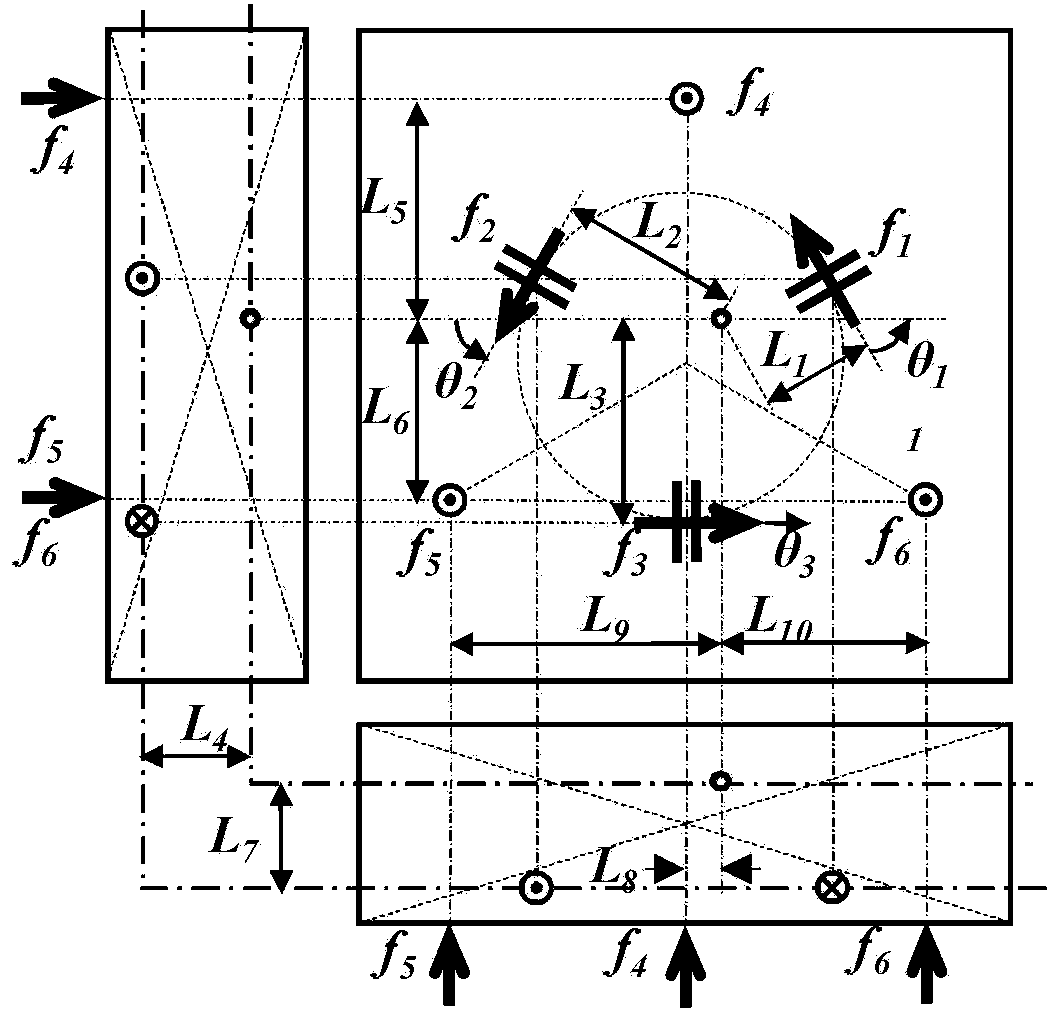
[0066]Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that in step 1, the conversion relationship between the driving force and torque of the center of mass of the micro-movement part of the workpiece table and the driving force of the voice coil motor is specifically: F cog =L·f
[0067] where the matrix F cog =[F xcog f ycog T zcog f zcog T xcog T ycog ] T ,
[0068] f=[f 1 f 2 f 3 f 4 f 5 f 6 ] T ,
[0069] L = - cos θ 1 - cos θ 2 cos θ 3 0 0 ...
specific Embodiment approach 3
[0071] Embodiment 3: The difference between this embodiment and Embodiment 1 or 2 is that in Step 2, the positional relationship between the exposure center and the center of mass of the micro-movement part of the workpiece table is specifically:
[0072] x cog = x - ( y + y 0 ) r z + ( z + z 0 ) r y y cog ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More