

Six-dimensional force sense sensor for minimally invasive surgical robot
A surgical robot and minimally invasive surgery technology, applied in the directions of surgery, instruments, measuring force, etc., can solve problems such as lack of measuring torque, and achieve the effects of avoiding negative effects, small size, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
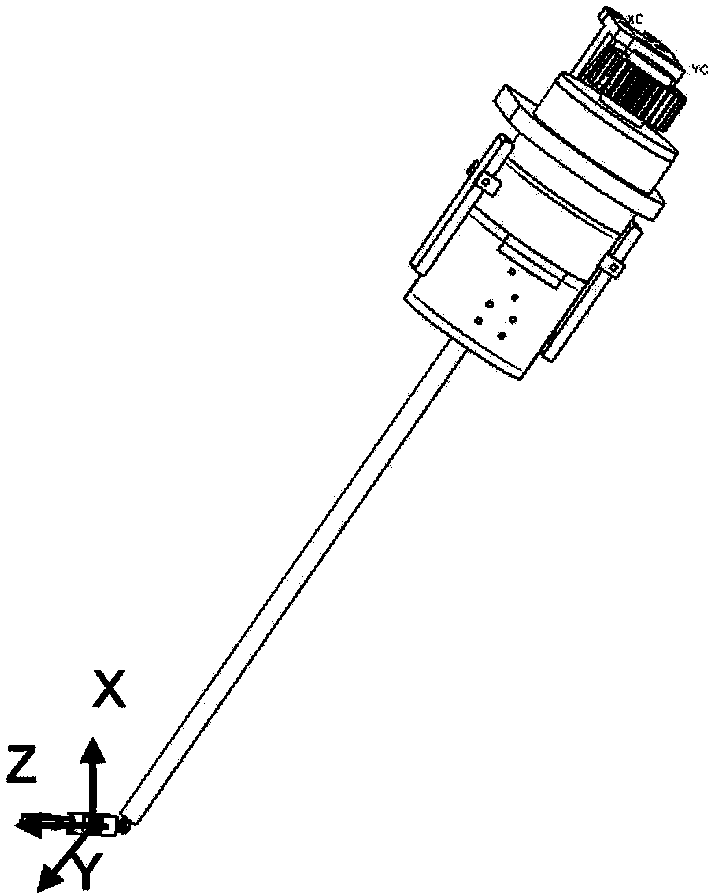
[0022] Such as figure 1 As shown, this embodiment intends to measure the force and moment on the end effector of the manipulator in the three translational degrees of freedom X, Y and Z directions, that is, the six-dimensional force sense component. At the beginning of the operation, the manipulator is inserted into the lesion of the patient through the incision of the patient's abdominal cavity or thoracic cavity. In order to measure the force sensory information of the contact between the end ef...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More