

Three-transfer-one-shift four-degree-of-freedom heavy-load static-balance parallel motion simulation stand mechanism
A static balance and load-bearing platform technology, applied in teaching models, educational tools, instruments, etc., can solve the problems of slow dynamic response, difficult assembly and control, and poor bearing capacity, so as to improve the dynamic response speed and reduce the difficulty of control , the effect of high-precision movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
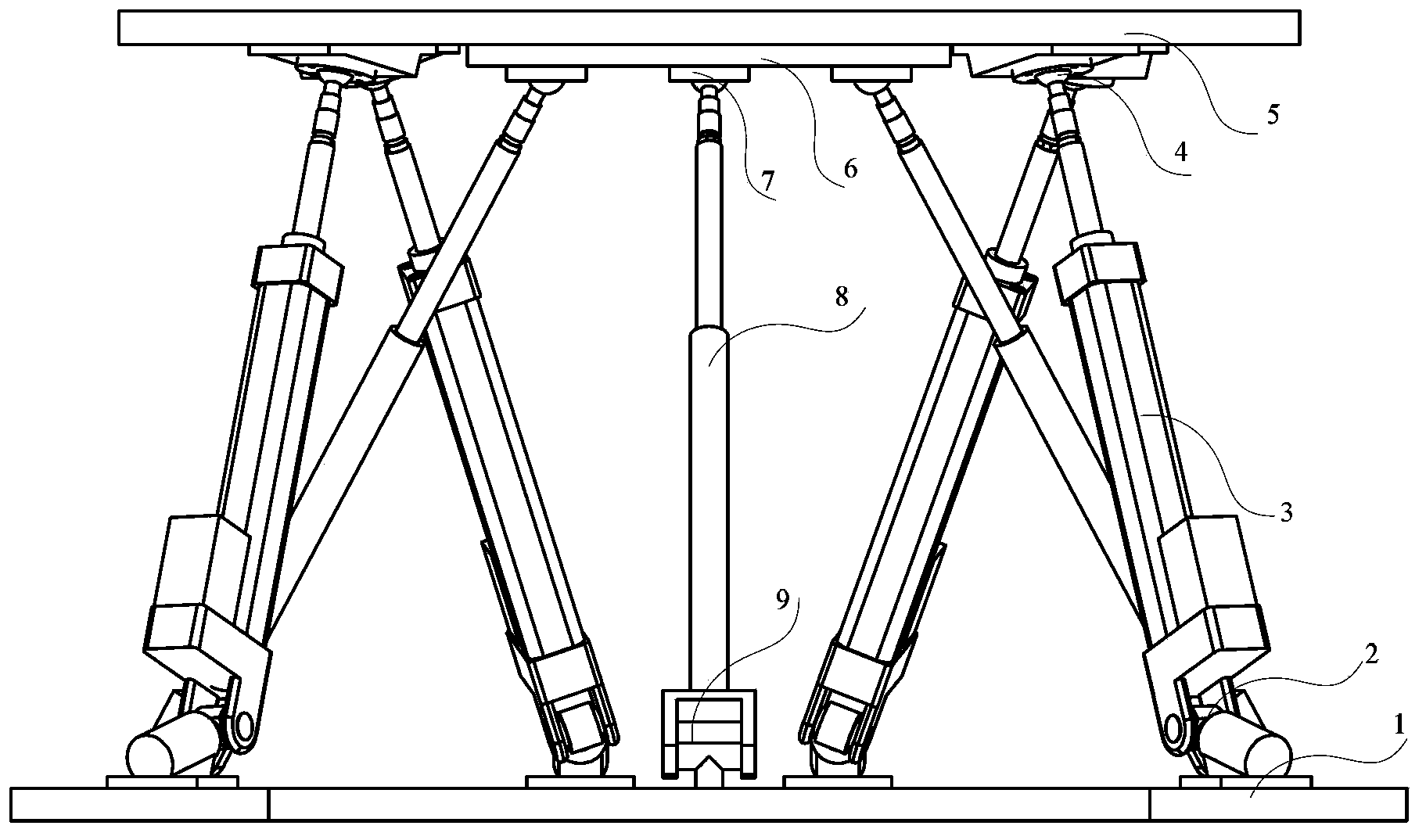
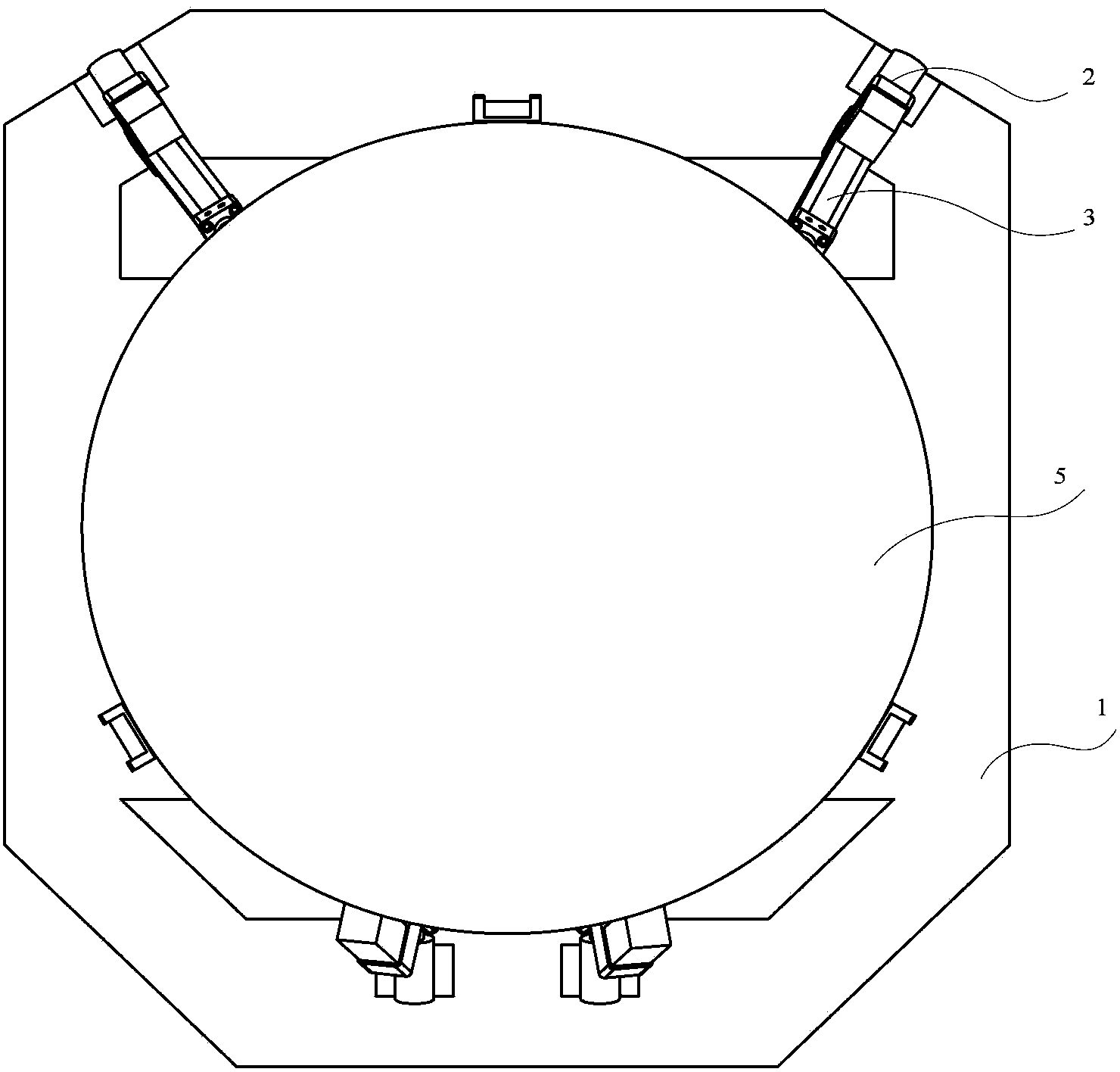
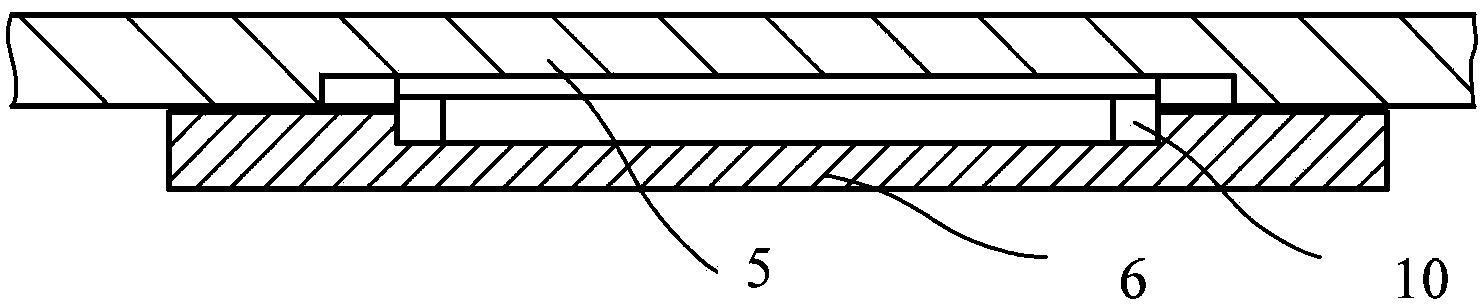
[0019] exist figure 1 and figure 2 In the schematic diagram of the three-rotation-one-shift four-degree-of-freedom heavy-duty static balance parallel motion simulation table shown in the figure, the end of the telescopic rod of the electric cylinder 3 in the four drive branches with the same structure passes through the first spherical joint 4 and the motion platform 5 connection, the tail of the electric cylinder is connected to the base platform 1 through a universal joint 2, the line connecting the center points of the four first spherical joints forms a square, and the line connecting the center points of the four universal joints forms an isosceles trapezoid. The tail of the balance hydraulic cylinder 8 in the balance branch is connected to the foundation platform through the first rotating pair 9, and the end of the telescopic rod of the balance hydraulic cylinder is connected to the load-bearing platform 6 through the second spherical joint 7, and the load-bearing plat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More