

Nonmagnetic inertial navigation unit calibration method based on image measuring technologies
A technology of image measurement and calibration method, which is applied in the field of non-magnetic inertial calibration system, can solve the problems of high site requirements, high cost, and the influence of motor magnetic field on calibration, etc., and achieve the effect of low cost and convenient use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to have a further cognition and understanding of the features, purposes and functions of the present invention, the specific use of the present invention will be described below, and the detailed steps are as follows:
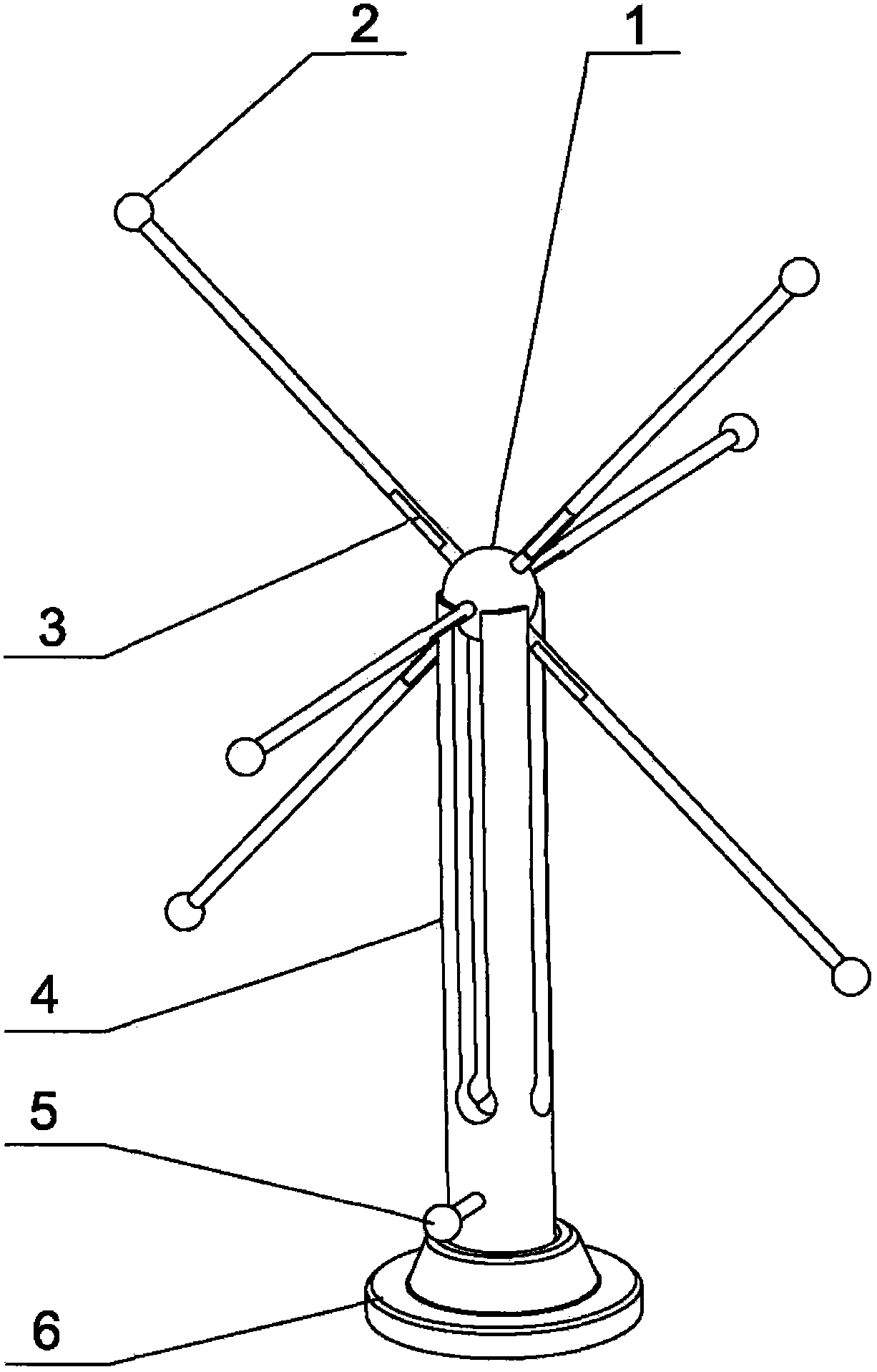
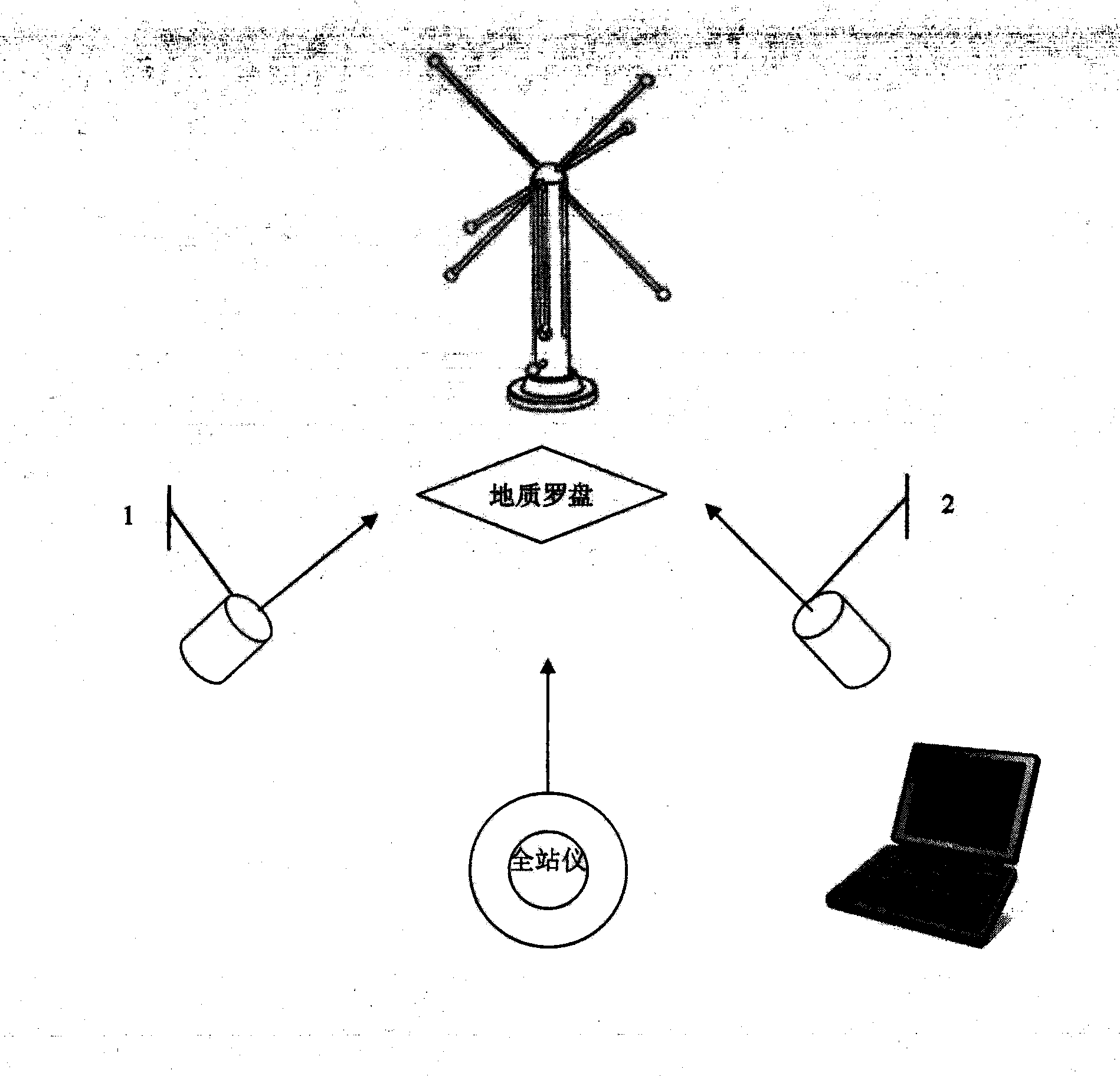
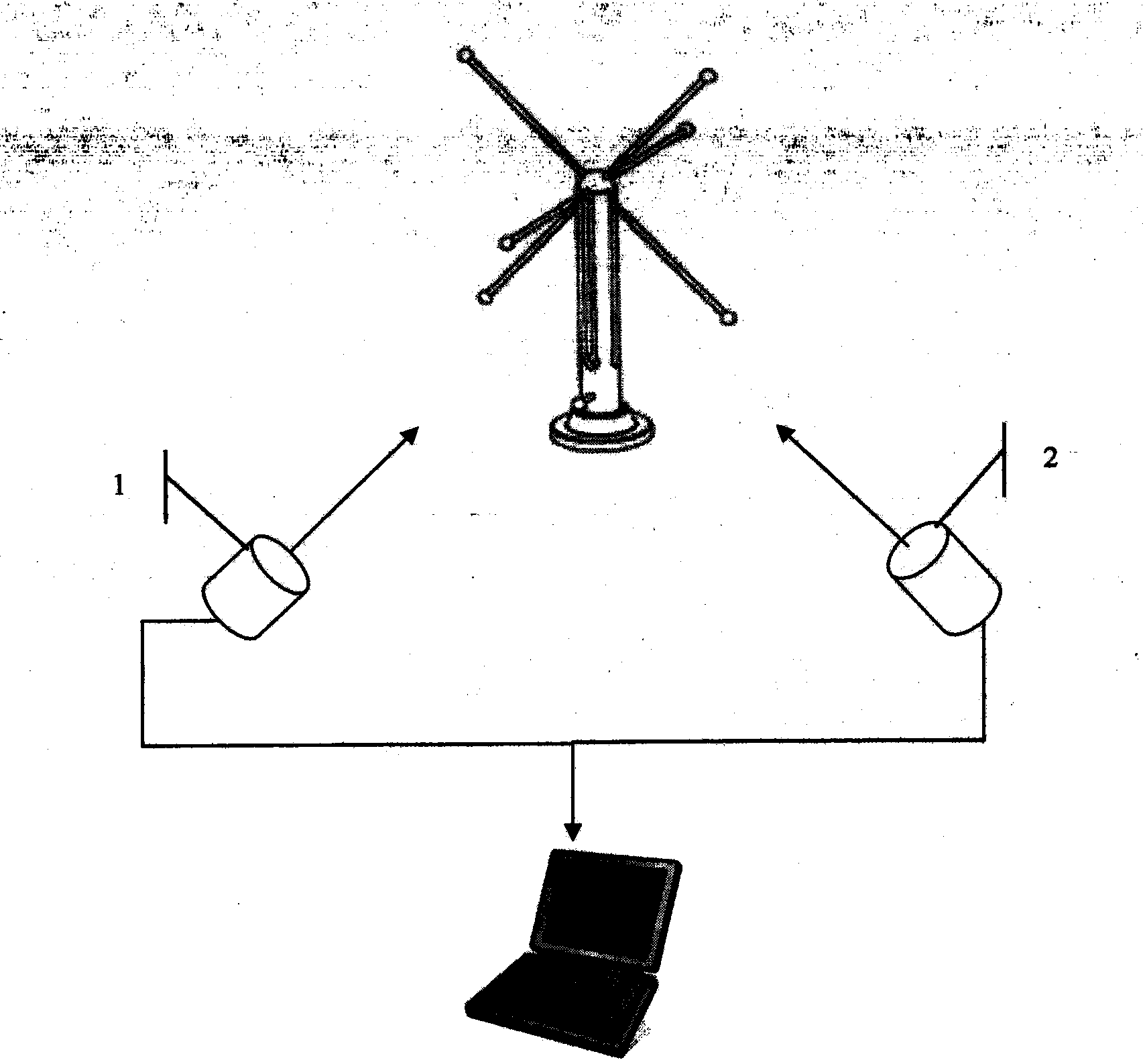
[0023] First, according to figure 2 Set up and debug the total station and camera to the working state, place the calibration frame to the predetermined position, ensure that the total station and camera system are not blocked after measurement, fix all parameters of the total station and camera until the end of the experiment, and It is required that there is no external strong magnetic field (display, power supply, electrical equipment, ferrous metal objects, etc.) in the experimental site close to the calibration frame.
[0024] 1 Determine the magnetic north direction of the local geomagnetic field
[0025] Place the geological compass horizontally within the scope of the calibration frame, mark two marking balls M1 and M2 on the center li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More