

Two-finger translation mechanical arm
A manipulator and translation technology, applied in the field of robots, can solve the problems of difficulty in grasping workpieces that are too large or too small, difficult to adjust the distance between finger bases, and high requirements for installation and use, achieving simple structure, strong adaptability, The effect of enhancing the ability to grasp the workpiece
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] Further illustrate the present invention below in conjunction with accompanying drawing.
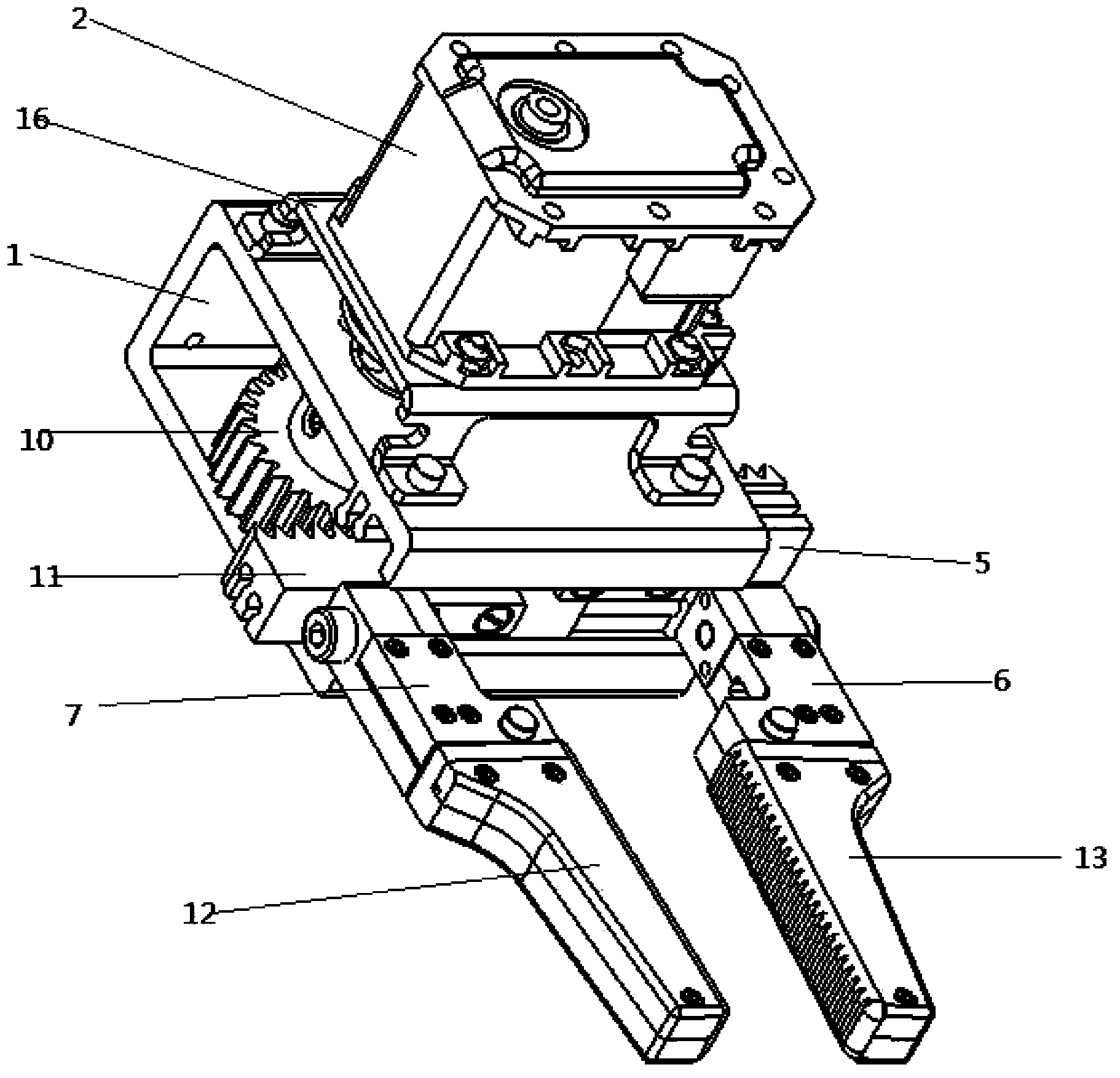
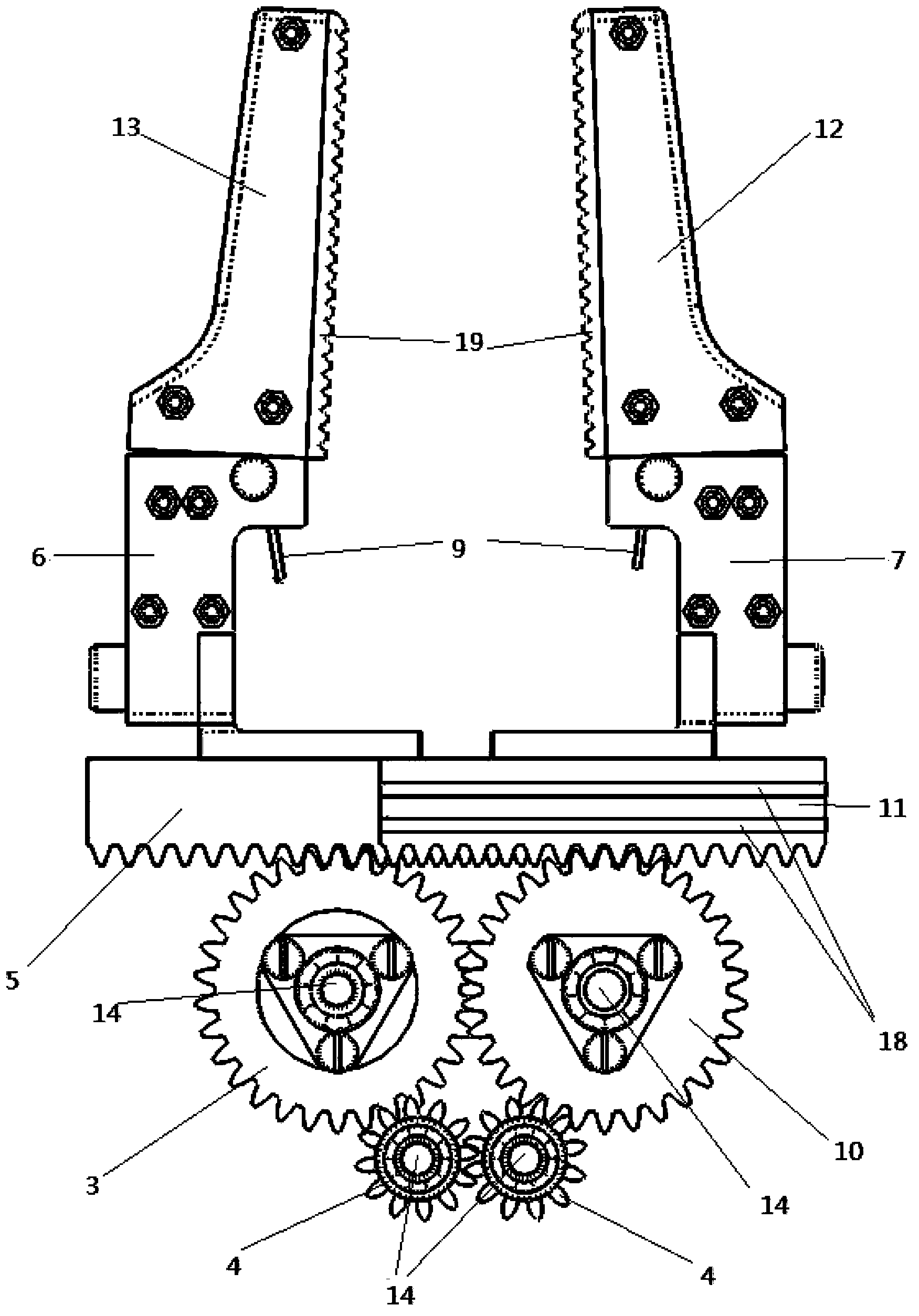
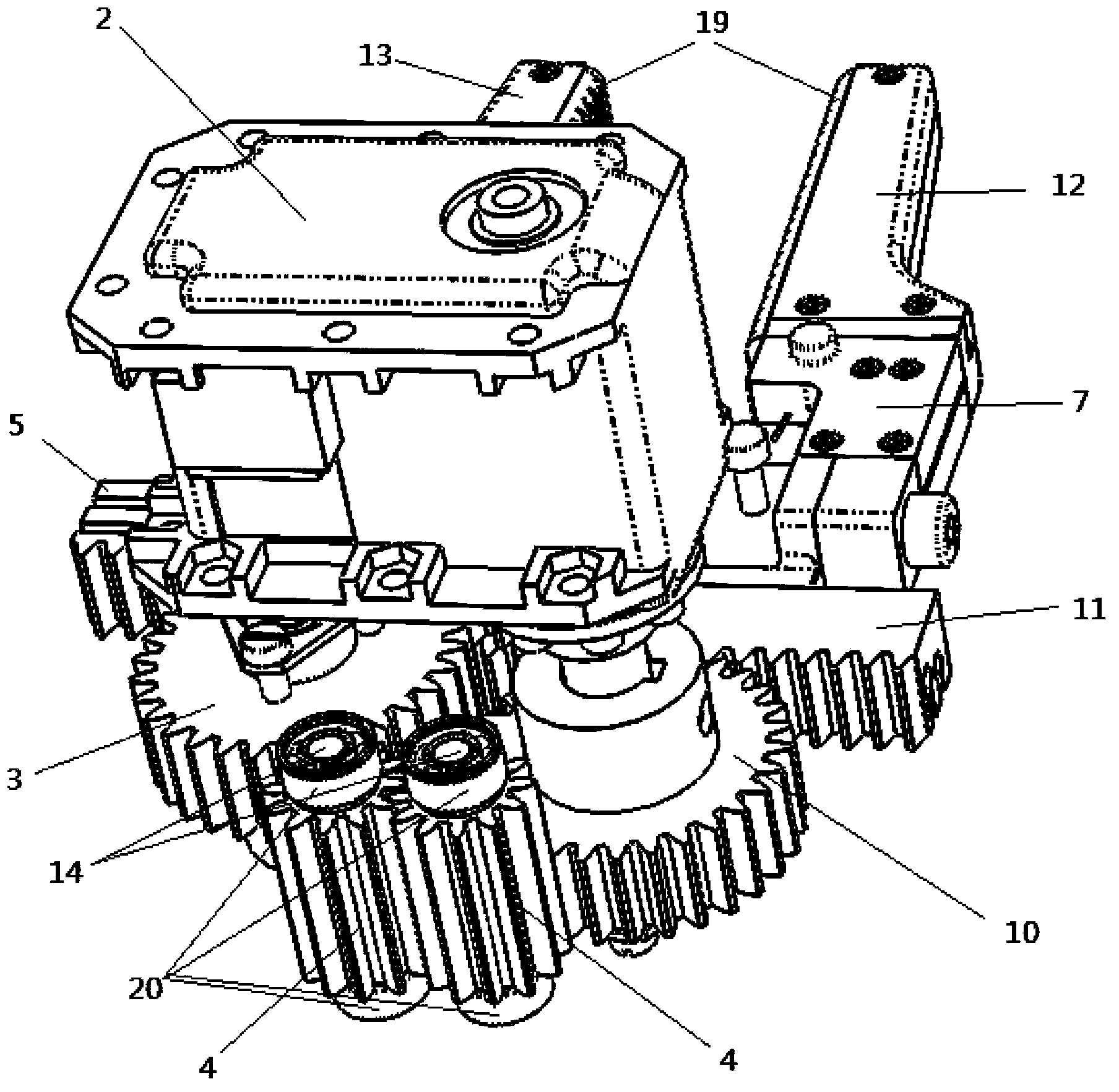
[0014] refer to Figure 1-Figure 5 , the structure of the two-finger translation manipulator of the present invention includes: palm base 1, steering gear 2, left finger gear 3, two transmission gears 4, left finger translation rack 5, left finger root 6, right finger root 7 , two micro switches 8, two recovery springs 9, right finger gear 10, right finger translation rack 11, right finger 12, left finger 13, four gear shafts 14, steering frame 16, rubber skin 19 and balls bearing 20.
[0015] Servo 2 (see figure 1 ) is installed above the palm base 1 through the steering rack 16, and the palm base 1 (see Figure 6 ) There are two horizontally protruding rack guide rails 17 on the upper and lower inner surfaces of the front part, and there are two transversely recessed teeth on the lower plane of the left finger translation rack 5 and the upper plane of the right finger transla...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More