

Robot for detecting underwater topography and water quality index in reservoir area
A technology of underwater terrain and robots, which is applied in the direction of instruments, non-electric variable control, position/direction control, etc., can solve problems that do not conform to sustainable development, consume manpower, material resources and resources, and achieve light weight, convenient transportation and low cost. low effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
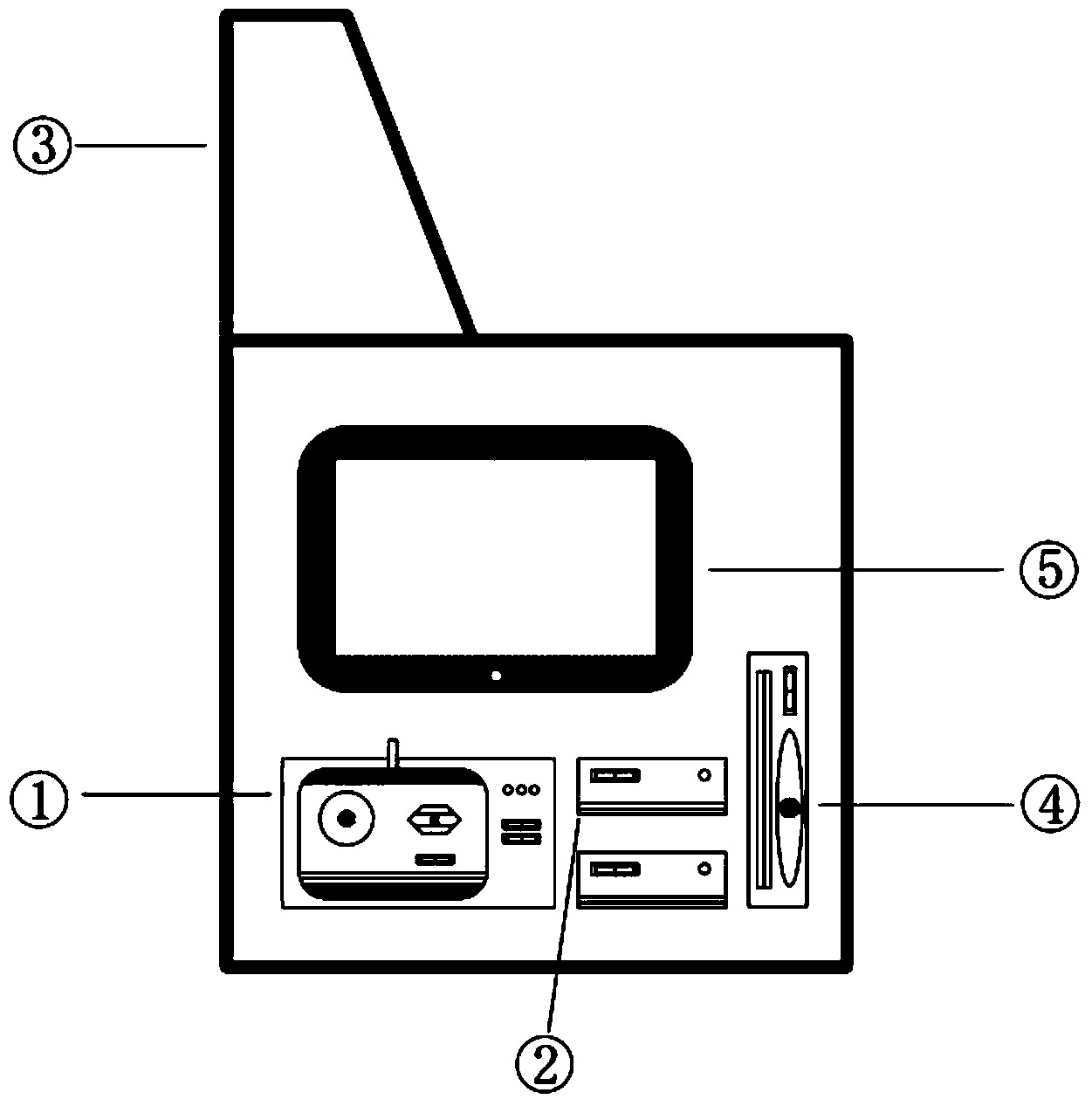
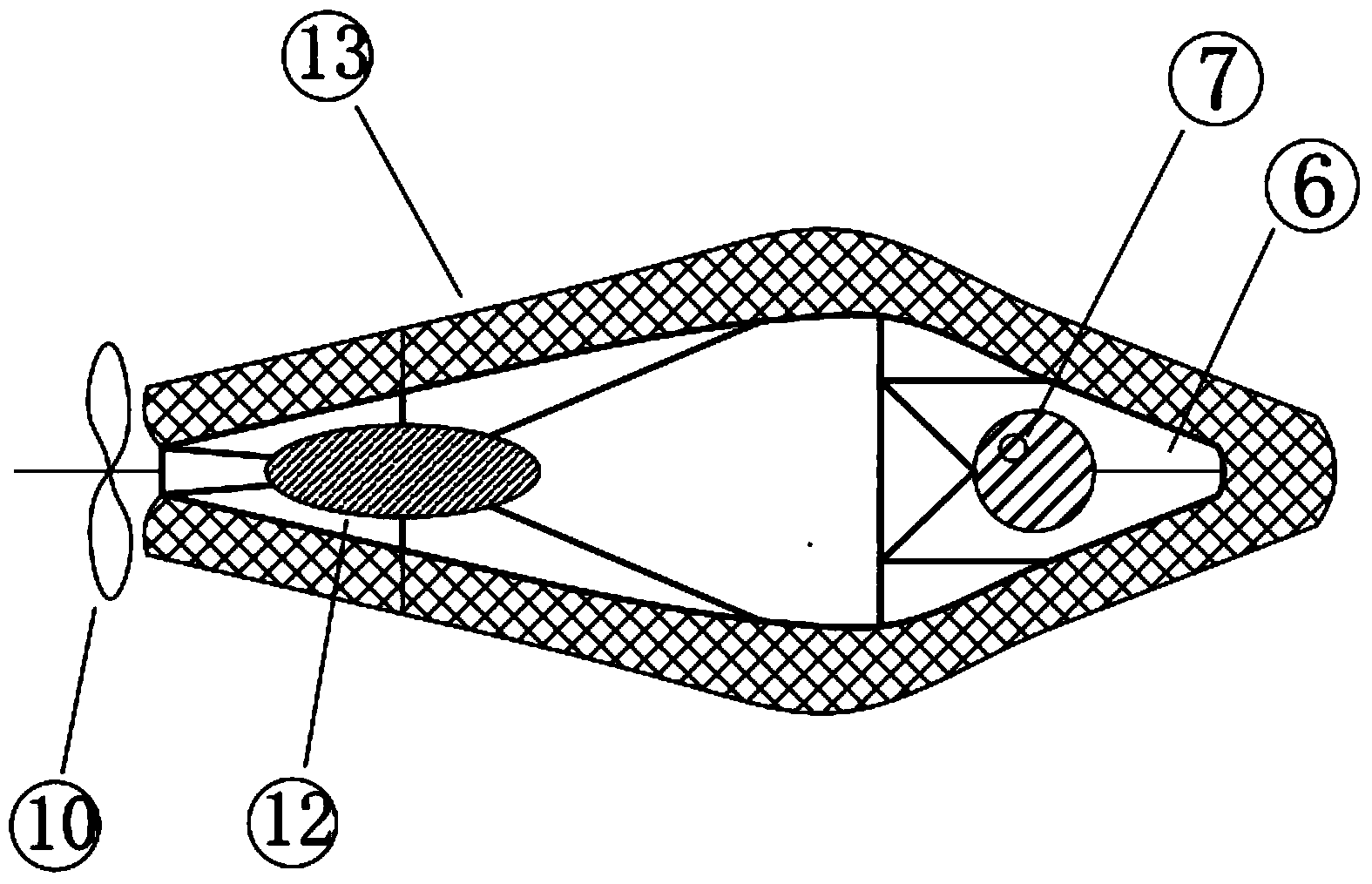
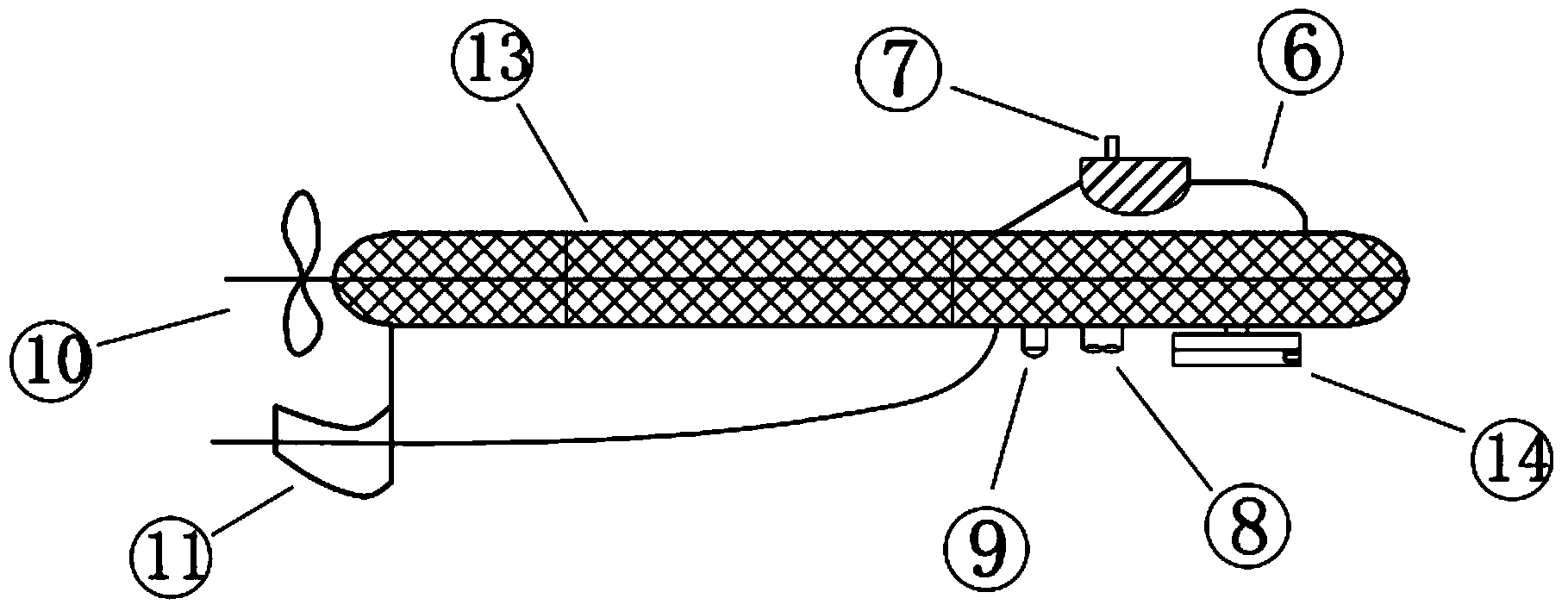
[0042] The invention relates to an underwater terrain and water quality index detection robot in a reservoir area, which includes a ground base station system and a robot system. The relationship between the two is: the ground base station system is on the shore, the robot system is in the water, the ground base station system and the robot system are connected by cables, and the ground base station system is used to control the robot system to work; the working status of the robot system is divided into Above-water state and underwater state. When it is necessary to draw an underwater topographic map, the working state of the robot system is the above-water state. When it is necessary to measure underwater water quality indicators and obtain underwater images, the working state of the robot system is the underwater state.
[0043] The ground base station system includes a metal shell main body and 6 modules. The 6 modules include: robot control module ①, GPS reference station...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More