

Initial alignment and self-calibration method of double-shaft rotation type strapdown inertial navigation system
A strapdown inertial navigation and initial alignment technology, which is used in navigation, measurement devices, instruments, etc. through velocity/acceleration measurement. It can solve problems such as changes in inertial device errors, and achieve the effect of improving positioning accuracy and eliminating influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in detail below in conjunction with specific embodiments.
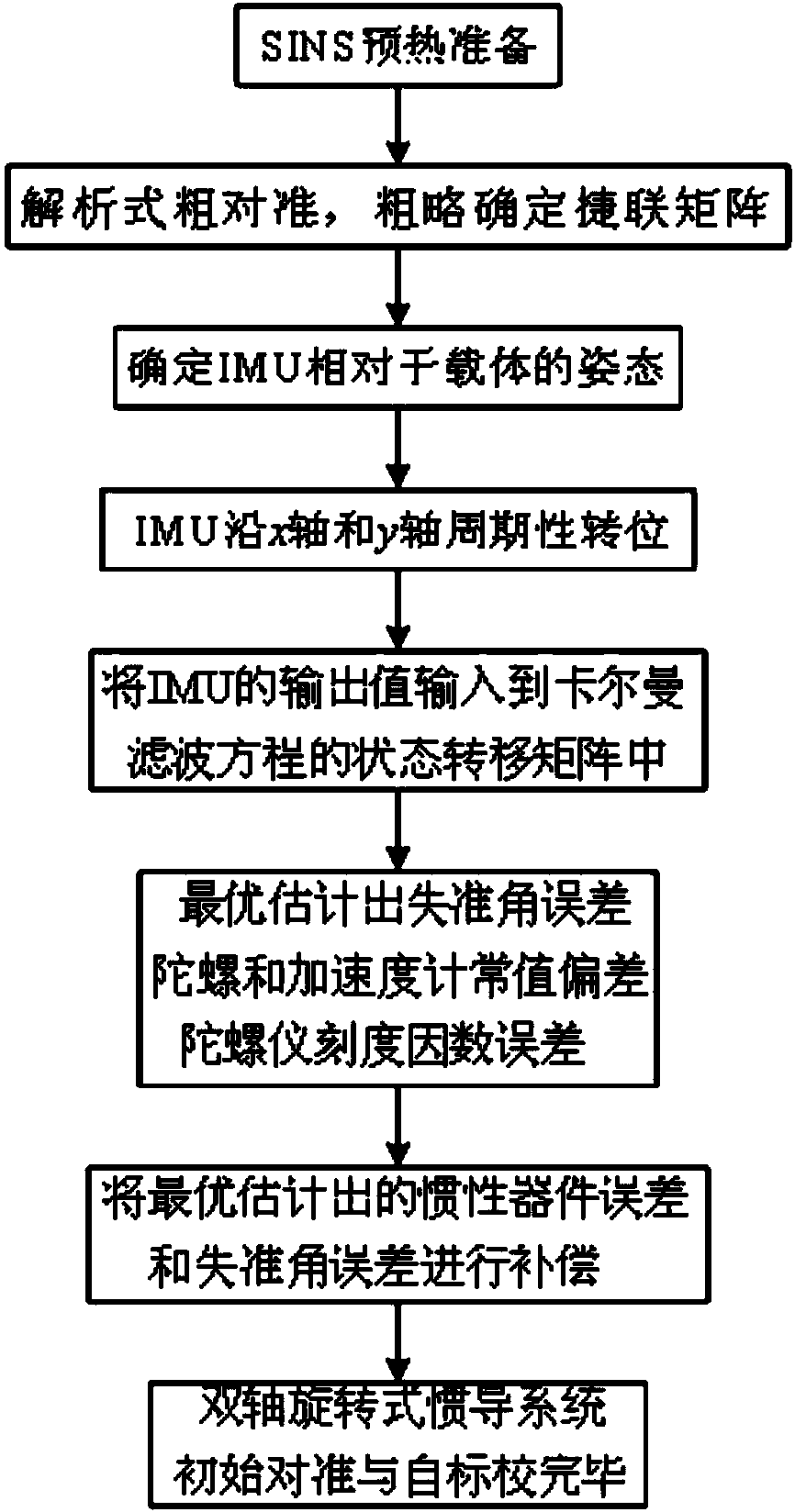
[0039] combine figure 1 , the concrete steps of the present invention are:
[0040] Step 1: Start the dual-axis rotary SINS and fully warm up.
[0041] Step 2: The two-axis rotary strapdown inertial navigation system uses the output data of the gyroscope and accelerometer to perform a 20-minute analytical coarse alignment to determine the initial attitude of the inertial navigation system. Start the initial alignment and self-calibration procedures of the strapdown inertial navigation system based on the Kalman filter. The program can use the Kalman filter method to realize the optimal estimation of the system state during the system transposition process.
[0042] Firstly, the state equation of the Kalman filter equation of the two-axis rotary strapdown inertial navigation system is established as follows:
[0043] X · ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More