

Mechanical gripper with three-finger structure
A technology of mechanical grippers and grippers, applied in the field of manipulators, can solve problems such as long finger closing time, complex finger structure, and complex design structure, and achieve the effect of light weight, simple structure, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
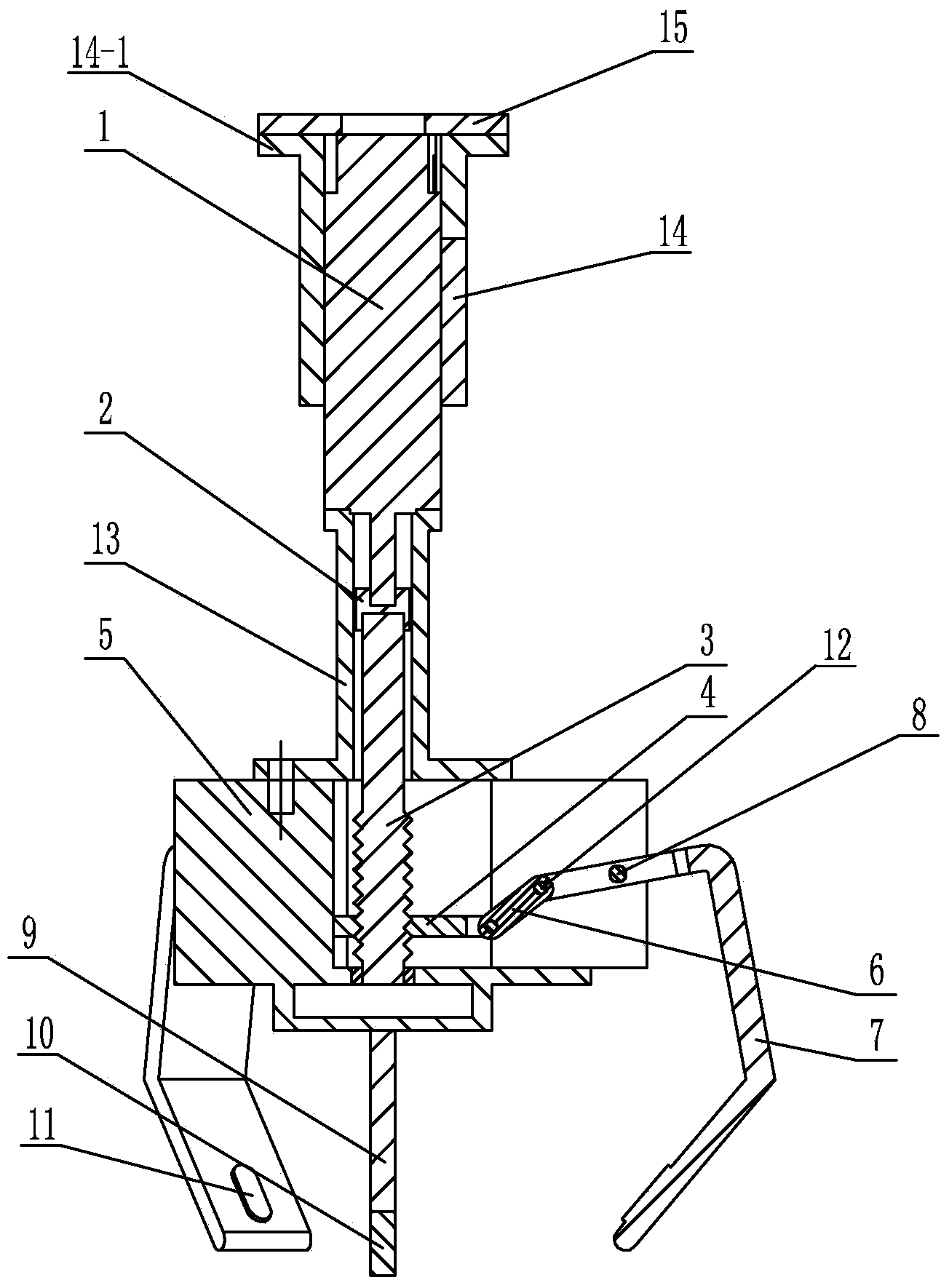
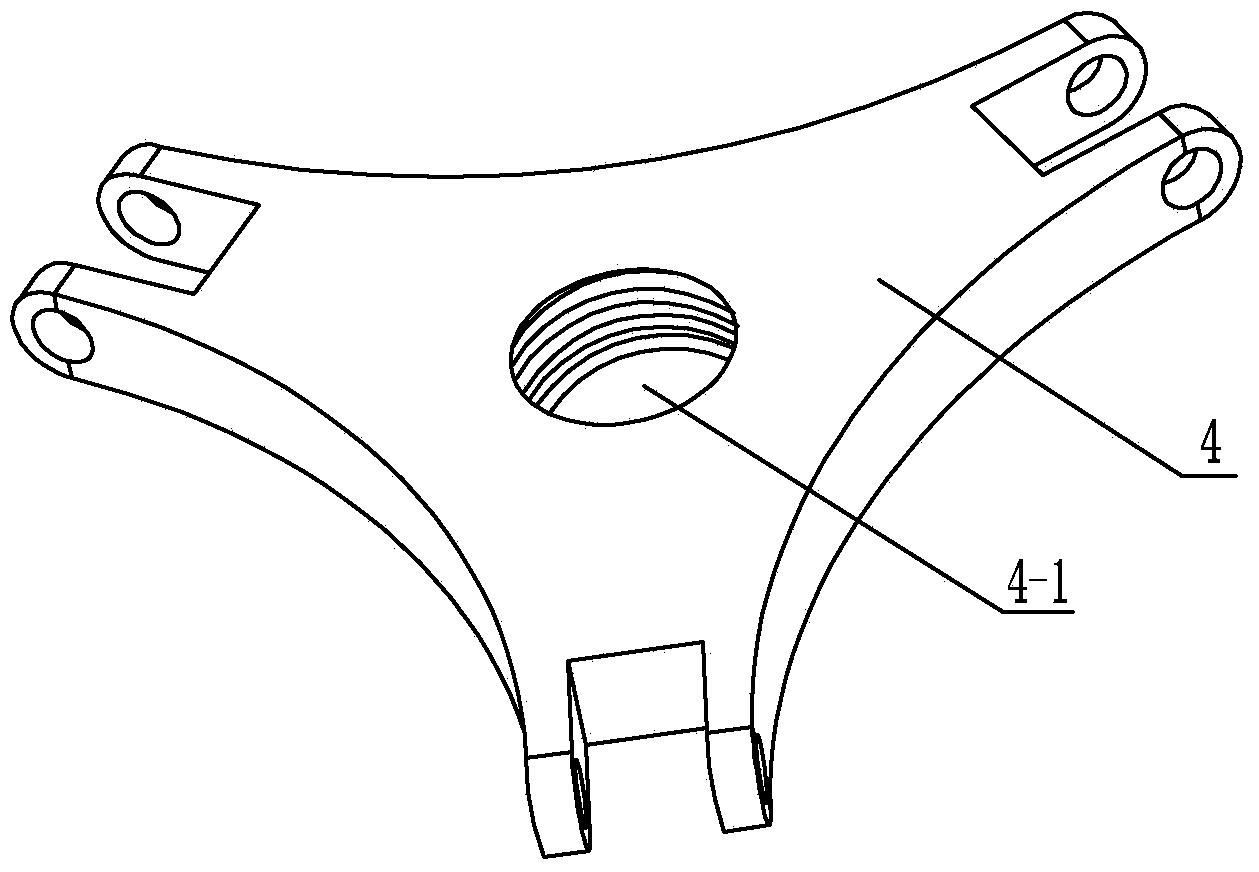
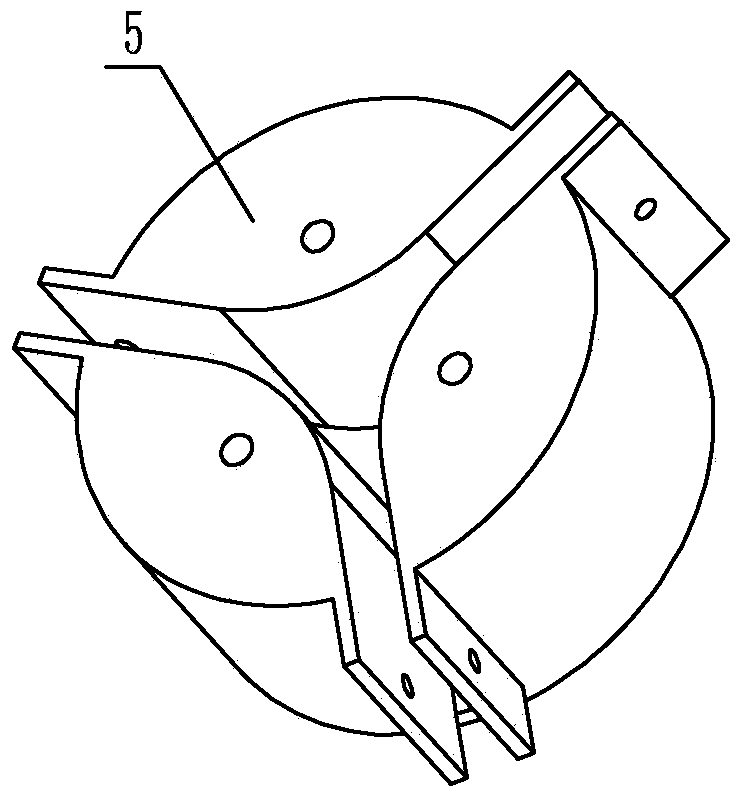
[0011] Specific implementation mode one: combine Figure 1 ~ Figure 4 Describe this embodiment. This embodiment includes a motor 1, a coupling 2, a screw 3, a slider 4, a claw housing 5, a probe 9, a signal sensor 10, three connecting rods 6, three fingers 7, Three fixed shafts 8 and three switch sensors 11, the output end of the motor 1 is connected with the screw rod 3 through the coupling 2, the center of the slider 4 is provided with a threaded hole 4-1, and the slider 4 is threaded with the screw rod 3, The slider 4 moves along the axial direction of the screw rod 3, and the three connecting rods 6 are evenly distributed along the same circumference. One end of each connecting rod 6 is connected to the slider 4 through a connecting shaft 12, and the other end of each connecting rod 6 is connected to The shaft 12 is connected with a finger 7, the finger 7 is installed on the gripper housing 5 through the fixed shaft 8, the finger 7 opens or closes around the fixed shaft 8,...
specific Embodiment approach 2
[0013] Specific implementation mode two: combination figure 1 Describe this embodiment, the difference between this embodiment and specific embodiment 1 is that it also adds a connecting sleeve 13, the connecting sleeve 13 is sleeved on the output shaft of the motor 1, the coupling 2 and the screw rod 3, and the connecting sleeve 13 The lower end of the lower end is fixedly connected with the claw housing 5 through a connecting element. This design makes the mechanical transmission complete in a closed environment, making the transmission more stable. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0014] Specific implementation mode three: combination figure 1 This embodiment is described. The difference between this embodiment and the specific embodiment 1 or 2 is that it also adds a motor fixing sleeve 14 , and the motor fixing sleeve 14 is sleeved on the motor 1 . The motor fixing sleeve 14 is used to fix the motor 1 . Other compositions and connections are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More