

Pneumatic power-assisted manipulator
A technology that assists manipulators and pneumatics. It is applied in the field of manipulators. It can solve the problems of poor multi-channel analog signal data acquisition and analysis, slow processing speed, and single fixed communication mode. It achieves improved safety and automation level, simple structure, The effect of easy stepless speed regulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
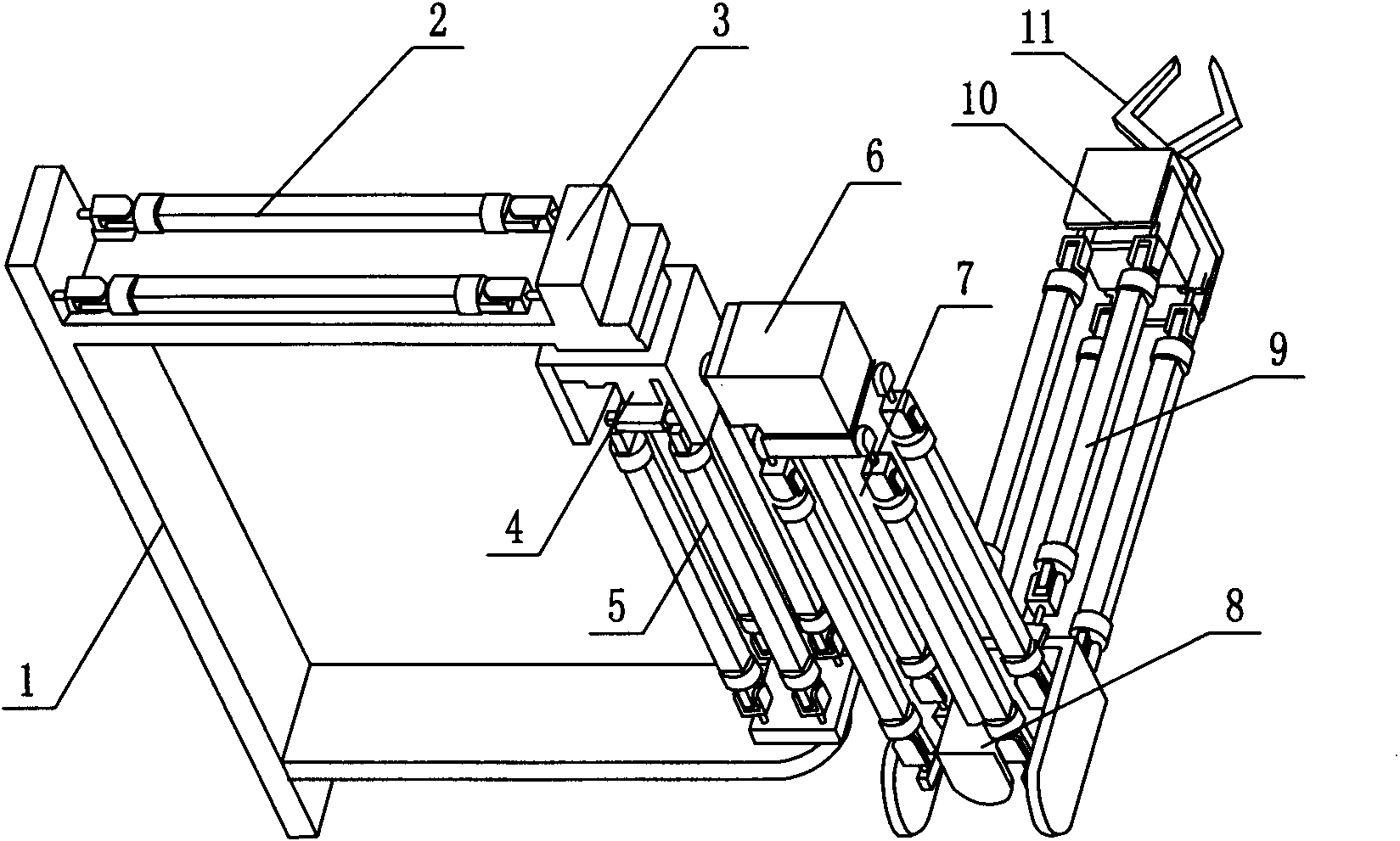
[0010] In the figure, there are rack 1, pneumatic muscle 2, shoulder joint I3, shoulder joint II4, rack arm 5, shoulder joint III6, big arm 7, elbow joint 8, forearm 9, wrist joint 10, air gripper 11, The pneumatic manipulator is mainly composed of three parts: the frame 1, the mechanical arm 5 and the air gripper 11, which play the role of fixed support. The shoulder joint I3 is connected to the shoulder joint II4, the shoulder joint III6 is connected to the shoulder joint II4, and the shoulder joint III6 is connected to the elbow joint 8. There is a large arm 7, a forearm 9 is arranged between the elbow joint 8 and the wrist joint 10, the wrist joint 10 is connected with air claws 11, and the movement of driving the shoulder joint I3 is composed of 2 pneumatic muscles 2, and the rack arm 5 has 4 There are four pneumatic muscles 2 on the upper arm 7 and four pneumatic muscles 2 on the forearm 9 .
[0011] The pneumatic manipulator can achieve 4 degrees of freedom. Since the m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More