

Double-robot device for cleaning garbage on water surface
A dual-robot, water surface garbage technology is applied to a robot that cleans garbage on the water surface. It can solve the problems that the robot cannot return according to the prescribed route, the robot sinks into the water, and the burden on the robot is increased, so as to achieve the effect of simple and efficient cleaning work, improving mechanical power, and protecting the water resources environment.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
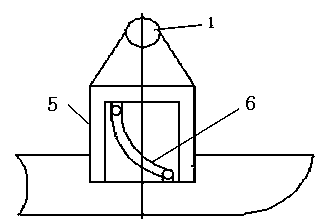
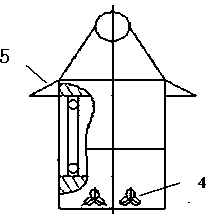
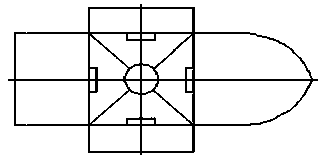
[0020] Such as Figure 1 to Figure 4 Shown, the double robot device of cleaning water surface rubbish of the present invention comprises water surface cleaning rubbish robot. Two water surface cleaning rubbish robots are connected together by the block net in the mechanical net bag system 6.
[0021] The water surface cleaning garbage machine includes a long-sighted system 1, image transmission and signal receiving device, display system 2, remote sensing system 3, power system 4, solar power supply system 5, mechanical net bag system 6, wireless transmission 7, positioning 8, snare, and piles 9. Garbage area10.
[0022] Such as Figure 4 As shown, the telescopic system 1, the image transmission and signal receiving device, the display system 2, the remote sensing system 3, and the power system 4 are respectively connected with the solar power supply...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More