

Correcting method of installation errors of doppler log of autonomous underwater vehicle (AUV)
A technology of Doppler log and underwater vehicle, which is applied in the field of marine engineering, can solve the problems of speed conversion error and affect the system navigation accuracy, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
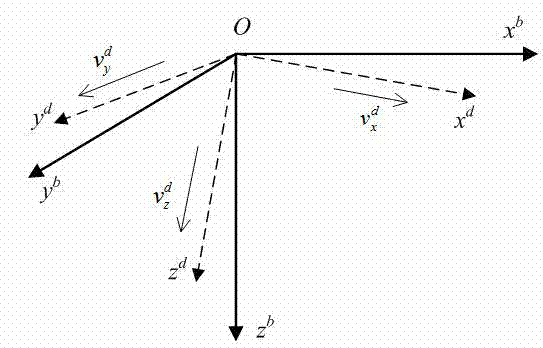
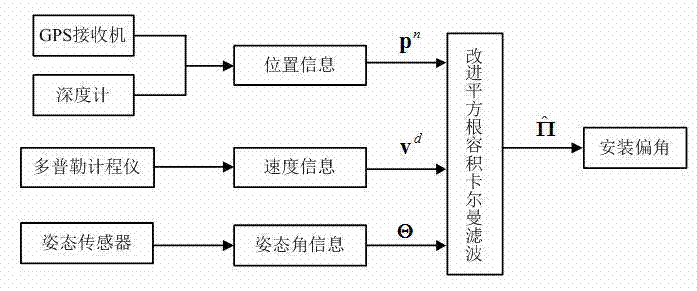
[0137] In the field water surface correction test, the roll, pitch, and yaw angle information are acquired through the attitude sensor, and the AUV forward speed and lateral speed information are collected by DVL. The above information can establish the observation equation of the correction algorithm. When evaluating the navigation performance, the GPS installed on the AUV is used to obtain the northeast position information of the AUV, which is used as the reference true value of the AUV position to evaluate the positioning accuracy of the AUV dead-reckoning algorithm. Since the depth information of the AUV is generally directly measured by the depth gauge, the accuracy is high, and navigation algorithm estimation is usually not required.
[0138] Both the AUV attitude sensor module and the DVL module are manually installed. Processing errors and installation errors are difficult to avoid. At the same time, there may be a fixed offset due to mechanical installation requirements ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More